Download presentation
Presentation is loading. Please wait.

1
Modern Control System Lab. Changwon National University Pendulum Design

2
Modern Control System Lab. Changwon National University 1. Intro – Cart type Inverted Pendulum

3
Modern Control System Lab. Changwon National University 1. Intro – Rotary type Inverted Pendulum

4
Modern Control System Lab. Changwon National University 1. Intro – Balancing Robot

5
Modern Control System Lab. Changwon National University 2. Project selection Cart TypeRotary TypeBal-Bot 장점 - 동역학 유도가 가장 용이 - 기구부 파손 가능성이 가장 작음 - 제어기 구성이 용이한 편 - 기구구성이 가장 용이 - 구동부 구성이 가장 용이 - 제작자 만족도 높음 - 가장 작은 기구부 구성 가능 단점 - 구동부의 구성이 조금 불편함 - 기구 크기가 상대적으로 커짐 - 동역학 구성이 약간 난해함 - 잘못된 설계로 인한 기구파손 위험 - 센서구성이 가장 어려움 - 기구부 구성이 가장 어려움 - 동역학 구성이 가장 난해함

6
Modern Control System Lab. Changwon National University 3. Body Design

7
Modern Control System Lab. Changwon National University 4. Sensor Selection 포텐셔미터인크리멘털형 엔코더 앱솔루트형 엔코더

8
Modern Control System Lab. Changwon National University 4. Sensor Selection 포텐셔미터인크리멘털 엔코더앱솔루트 엔코더 장점 - 구현이 가장 간단함 - 절대각도를 알 수 있음 - 노이즈에 강함 - 전체 각도를 모두 측정 가능 - 노이즈에 강함 - 절대각도를 알 수 있음 단점 -ADC 의 사용으로 인한 노이즈 - 사각이 존재함 - 엔코더보다 회전 마찰이 높음 - 구현을 위한 추가회로가 필요함 - 절대 0 도를 세팅해야함 - 데이터라인 (8bit 이상 ) 필요
 필요.")
9
Modern Control System Lab. Changwon National University 5. Encoder 오토닉스 http://www.autonics.co.kr/ 근래 출시되는 프로세서는 기본적으로 인크리멘 탈형 엔코더 해석기능을 내장하고 있음. (DSP2812, CortexM3 등 ) 전용 해석칩이 존재함 (HCTL 2016 등 )
 전용 해석칩이 존재함 (HCTL 2016 등 ).")
10
Modern Control System Lab. Changwon National University 6. DC Motor 제어방법 :PWM DAC

11
Modern Control System Lab. Changwon National University 7. Control & Monitoring Method 마이크로프로세서 기반 PC 기반

12
Modern Control System Lab. Changwon National University 7. Control & Monitoring Method 요구 분야대상구현 센서엔코더엔코더해석기능 구동 DC 모터 PWM 혹은 DAC 모니터링 PC 와의 통신 시리얼통신 LABView 제어소숫점연산기능

13
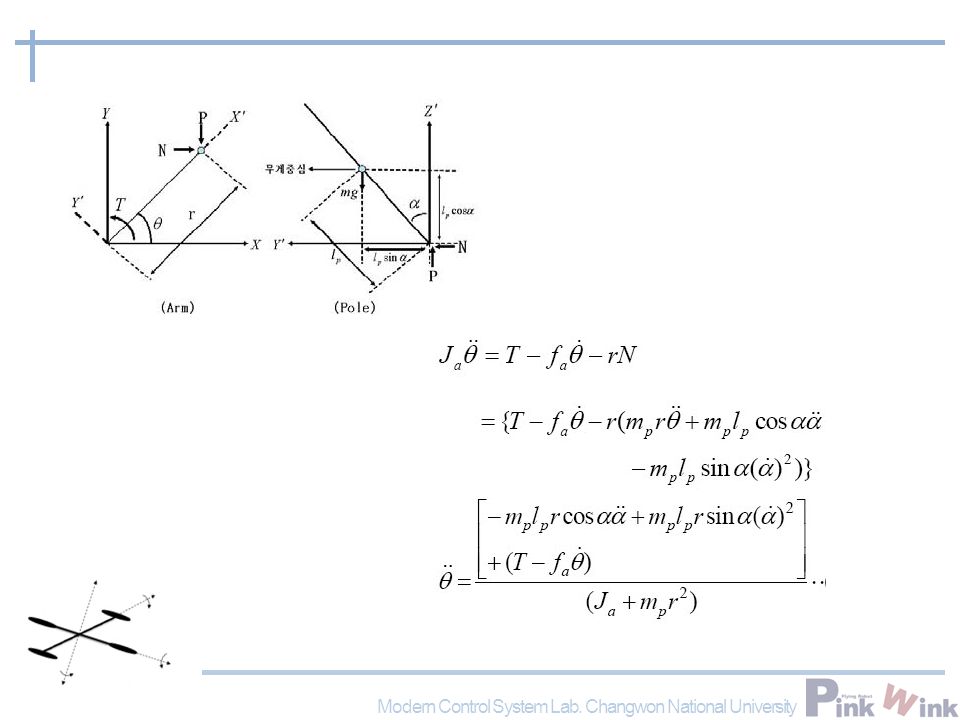
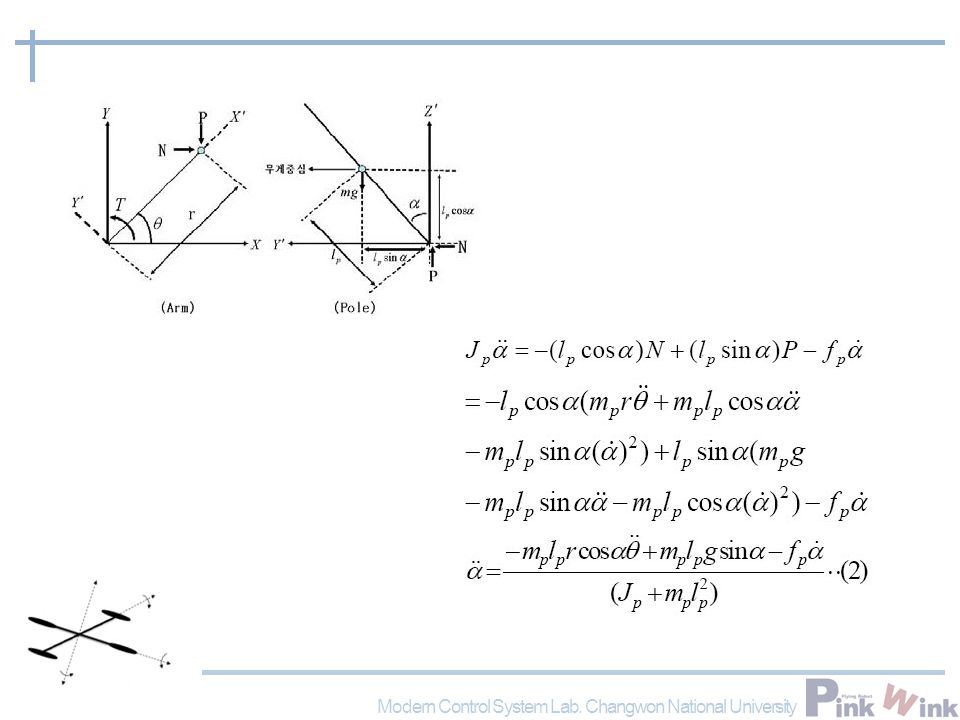
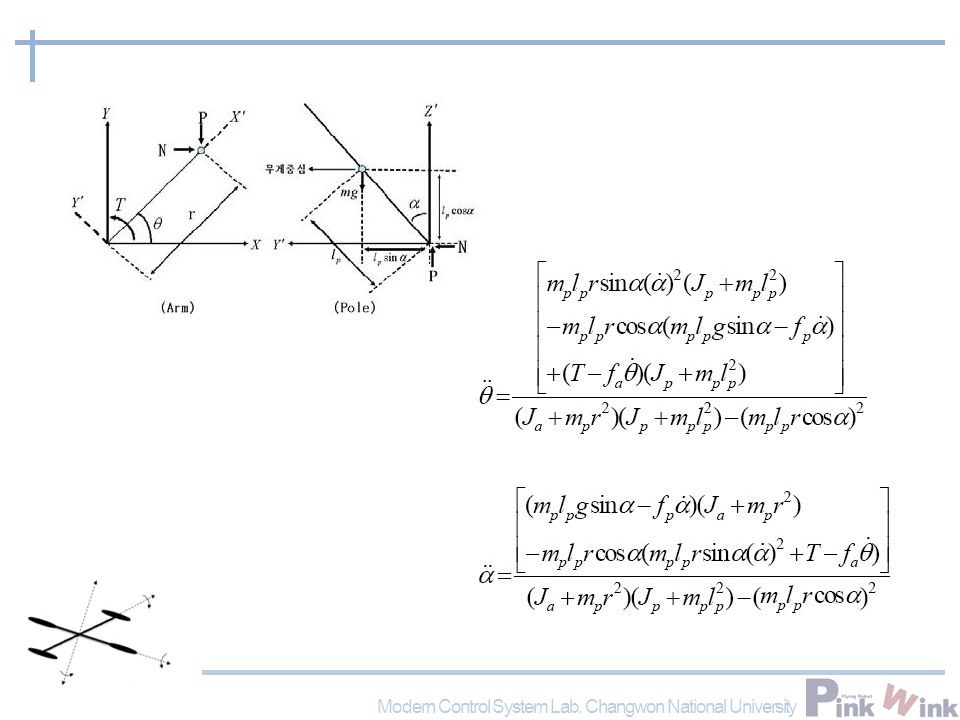
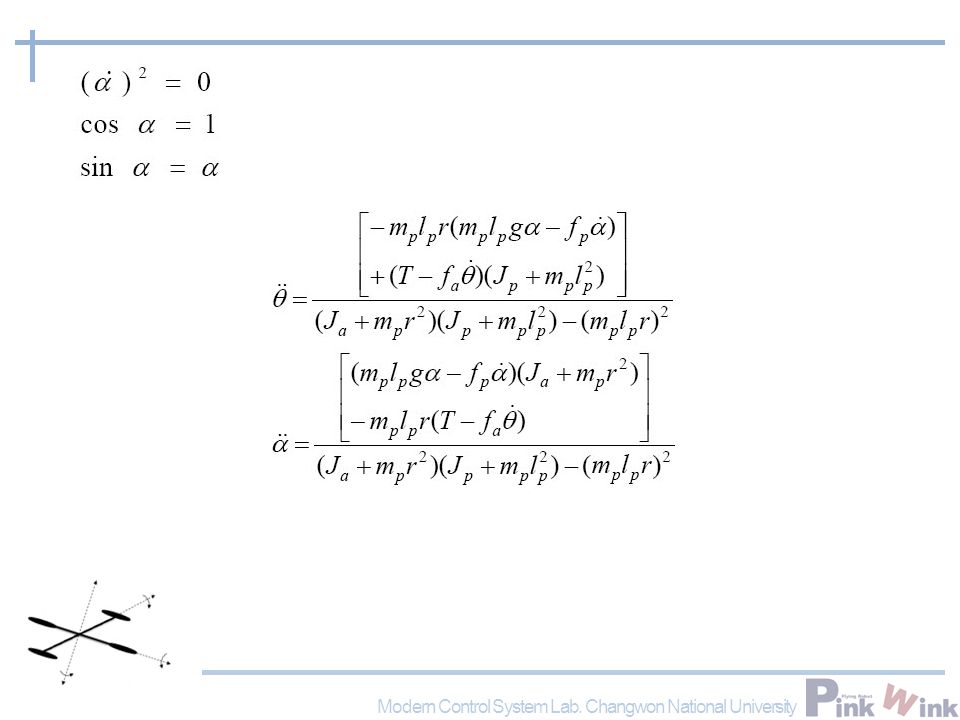
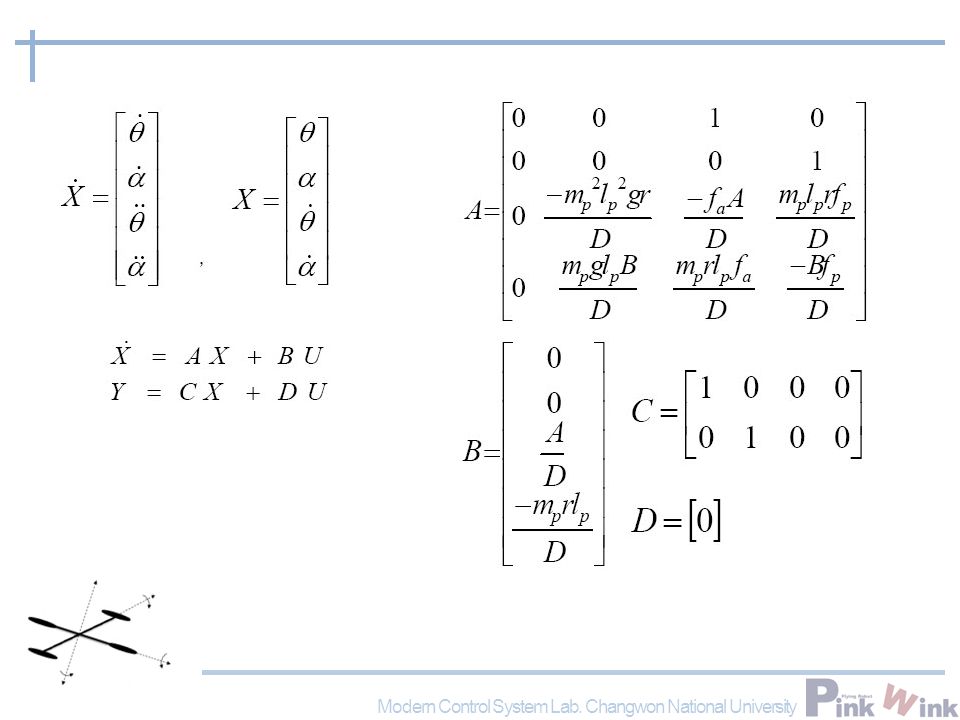
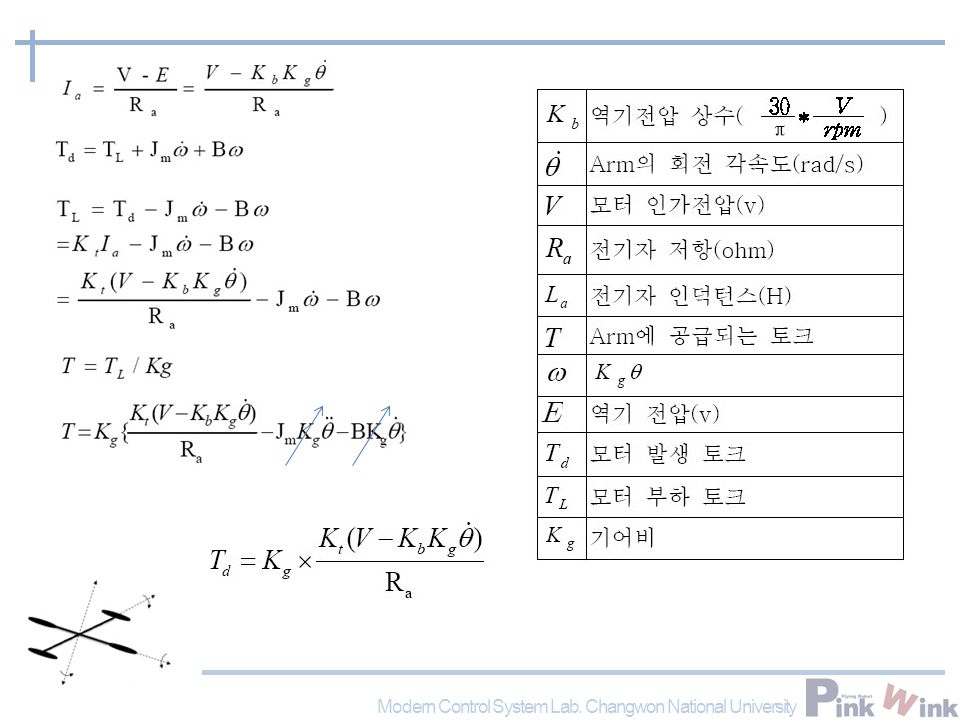
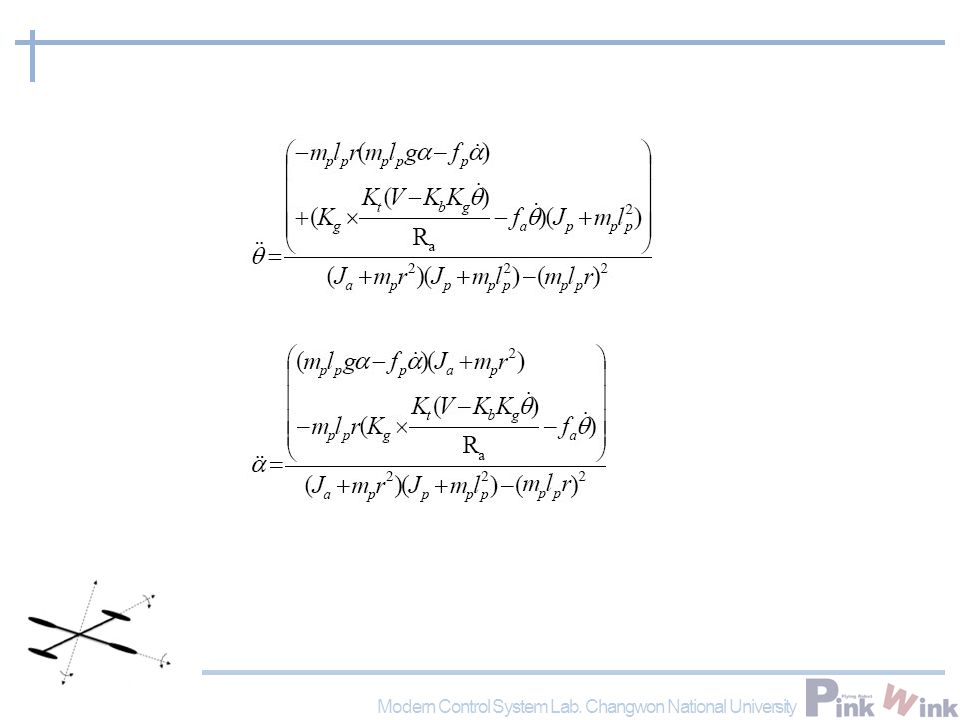
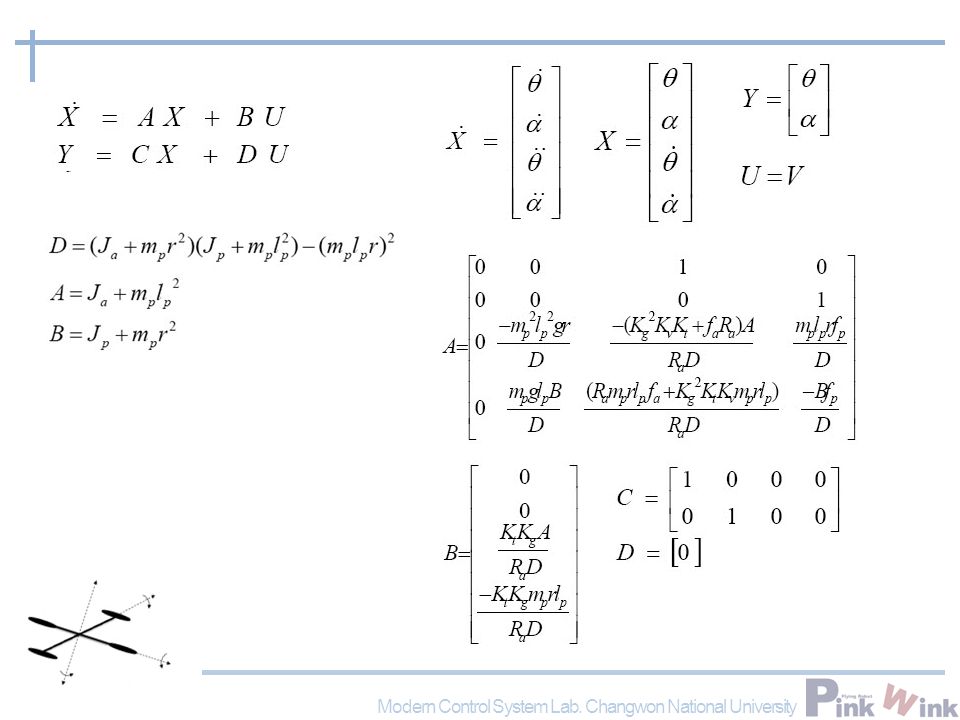
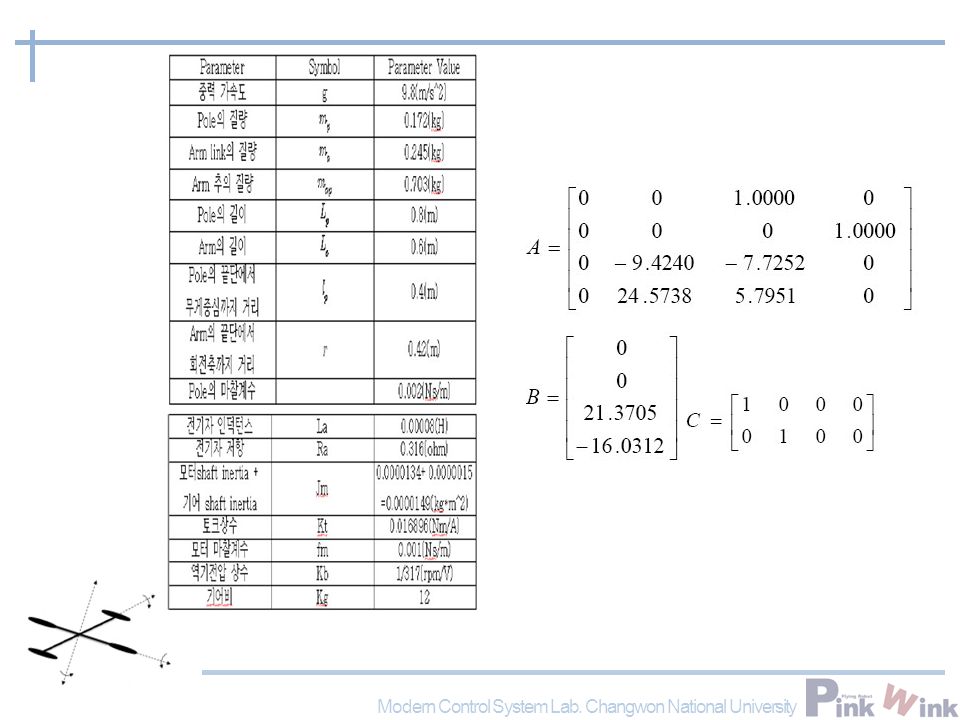
Modern Control System Lab. Changwon National University 8. Dynamics based Control

14
Modern Control System Lab. Changwon National University

24
9. Control without Dynamics Fuzzy controlOn-Off Control

25
Modern Control System Lab. Changwon National University 10. Controller Design without dynamics +0- ++++++0 0 0-- -0 --- +0- +---0 0-0+ -0++++

26
Modern Control System Lab. Changwon National University

27
function y = fcn(u, dot_u) %#eml mm = -5; m = -3; p = 3; pp = 5; if (u>0) if (dot_u>0) y = mm; elseif (dot_u == 0) y = m; else y = 0; end elseif (u==0) if (dot_u>0) y = m; elseif (dot_u == 0) y = 0; else y = p; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = p; else y = pp; end
 %#eml mm = -5; m = -3; p = 3; pp = 5; if (u>0) if (dot_u>0) y = mm; elseif (dot_u == 0) y = m; else y = 0; end elseif (u==0) if (dot_u>0) y = m; elseif (dot_u == 0) y = 0; else y = p; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = p; else y = pp; end")
28
Modern Control System Lab. Changwon National University function y = fcn(u, dot_u) %#eml mmm = -10; mm = -5; pp = 5; ppp = 10; if (u>0) if (dot_u>0) y = ppp; elseif (dot_u == 0) y = pp; else y = 0; end elseif (u==0) if (dot_u>0) y = pp; elseif (dot_u == 0) y = 0; else y = mm; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = mm; else y = mmm; end
 %#eml mmm = -10; mm = -5; pp = 5; ppp = 10; if (u>0) if (dot_u>0) y = ppp; elseif (dot_u == 0) y = pp; else y = 0; end elseif (u==0) if (dot_u>0) y = pp; elseif (dot_u == 0) y = 0; else y = mm; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = mm; else y = mmm; end.")
29
Modern Control System Lab. Changwon National University

Similar presentations

 생활신조 : 인생은 한방 ! 로또나 사자 이상형 : 청순 가련한 모태미녀 특이사항 : 걸그룹 노래에 환장함 식스팩을 갖기엔 슬픈 몸을 타고 남.>")
 지도에 나타난 우리 시. 도의 모습 (2/17) 지도를 알아보자 (1)>")



 안보와 무기체계 제 1 절 한반도 주변국가의 군사력과 무기체계 제 2 절 북한의 군사정책과 무기체계 제 3 절 한국의 안보목표 및 국방정책과 무기체계 제 4 절 결 론.>")

 S G Sogang Univ. Robot & Vision Lab. September 2007 Byung-Sung Kim 모터 구동.>")

 아이핑 담당 신동일 010-9011-0964 sdi@sdisoft.co.kr 네이버(다음)에서 아이핑검색 http://www.iping.club 아이핑 소개 (탁구대회) 담당 신동일 010-9011-0964 sdi@sdisoft.co.kr 아이핑.>")








