Download presentation
1
자동제어공학 5. 등가 시스템 정 우 용

2
제5장 등가 시스템 (Reduction of Multiple Subsystems)
목 표 블록선도 피드백 시스템의 해석과 설계 신호 흐름선도 Mason의 법칙 상태 방정식의 신호 흐름선도 상태 공간에서의 다른 표현 유사변환

3
목 표 다중 부 시스템의 블록선도를 단일 블록으로 단순화시키는 방법
목 표 다중 부 시스템의 블록선도를 단일 블록으로 단순화시키는 방법 다중 부 시스템들로 구성된 시스템의 과도 응답을 해석하고 설계 다중 부 시스템들로 구성된 시스템을 상태 공간에서 표현하는 방법 상태 공간에서 표현된 시스템을 다른 형태로 나타내는 방법

4
블록선도 부 시스템 : 입력, 출력, 전달 함수로 표현 용도 : 주로 주파수 영역의 해석과 설계
부 시스템 : 입력, 출력, 전달 함수로 표현 용도 : 주로 주파수 영역의 해석과 설계 Figure Components of a block diagram for a linear, time-invariant system

5
신호 흐름선도 (Signal flow graph)
구성 : 가지(branch, 시스템) + 마디(node, 신호) 용도 : 주로 상태 공간 해석에서 사용 특징 : 블록선도보다 신속, 간략하며 상태 변수들을 강조 할 수 있다.
 + 마디(node, 신호) 용도 : 주로 상태 공간 해석에서 사용. 특징 : 블록선도보다 신속, 간략하며 상태 변수들을 강조 할 수 있다.")
6
다중 부 시스템의 표현 방법 종속형 (Cascade Form) Block diagram Signal flow graph
 Block diagram Signal flow graph")
7
Signal flow graph 병렬형 (Parallel Form) Block diagram
 Block diagram")
8
피드백형 (Feedback Form) Block diagram Signal flow graph
 Block diagram Signal flow graph")
9
블록을 이동시켜 기본형으로 변환 (합점에 대한 좌우 이동)
")
10
블록을 이동시켜 기본형으로 변환 (분지점에 대한 좌우 이동)
")
11
예제 5.1 기본형을 이용한 블록선도의 간략화

12
합점 제거 등가 종속 시스템 등가 병렬 시스템 등가 피드벡 시스템

13
예제 5.2 블록이동에 의한 블록선도의 간략화 블럭이동 등가 피드백

14
등가 병렬 블럭이동 등가 직렬 등가 병렬 등가 피드백 등가 직렬

15
피드백 시스템의 해석과 설계 K (gain) 값이 증가함에 따라
Overdamped Response ( 두 실근, K < a2/4 ) Critically damped Response ( 중근, K = a2/4 ) Underdamped Response ( 두 복소수, K > a2/4 ) Undamped Response ( 두 허근, a=0이 아닌이상 불가)
 Critically damped Response ( 중근, K = a2/4 ) Underdamped Response ( 두 복소수, K > a2/4 ) Undamped Response ( 두 허근, a=0이 아닌이상 불가)")
16
Mason의 법칙 루프 이득 (loop gain)
다른 마디를 중복하여 통과하지 않으면서 임의의 마디에서 출발하여 신호 흐름들 따라 처음 출발한 마디로 되돌아오는 경로상에 있는 가지 이득의 곱 순방향 경로 이득 (forward-path gain) 신호 흐름선도의 입력에서 출력까지 순방향 경로를 따라가면서 취한 이득의 곱 비접촉 루프 (nontouching loop) 서로 공유하는 마디를 가지지 않는 루프 비접촉 루프 이득 (nontouching loop gain) 동시에 두 개, 세 개, 네 개 등으로 취한 비접촉 루프군의 이득의 곱
 신호 흐름선도의 입력에서 출력까지 순방향 경로를 따라가면서 취한 이득의 곱. 비접촉 루프 (nontouching loop) 서로 공유하는 마디를 가지지 않는 루프. 비접촉 루프 이득 (nontouching loop gain) 동시에 두 개, 세 개, 네 개 등으로 취한 비접촉 루프군의 이득의 곱.")
17
Mason’s Rule for reduction of Signal Flow Graph
k = number of forward paths Tk = the i th forward path gain (individual loop gains) (nontouching loop gains taken two at a time) (nontouching loop gains taken three at a time) (nontouching loop gains taken four at a time) (loop gains not touching the i th forward path)
 (nontouching loop gains taken two at a time) (nontouching loop gains taken three at a time) (nontouching loop gains taken four at a time) (loop gains not touching the i th forward path)")
18
예제 5.7 Mason 공식에 의한 전달 함수 계산 Forward path gain: Closed loop gain
(1) (2) (3) (4)
 (2) (3) (4)")
19
Nontouching loops taken two at a time
(5) loop (1) and loop (2): (6) loop (1) and loop (3): (7) loop (2) and loop (3): Nontouching loops taken three at a time (8) loops (1), (2), (3): Now, Portion of not touching the forward path Hence,
 loop (1) and loop (2): (6) loop (1) and loop (3): (7) loop (2) and loop (3): Nontouching loops taken three at a time. (8) loops (1), (2), (3): Now, Portion of not touching the forward path. Hence,")
20
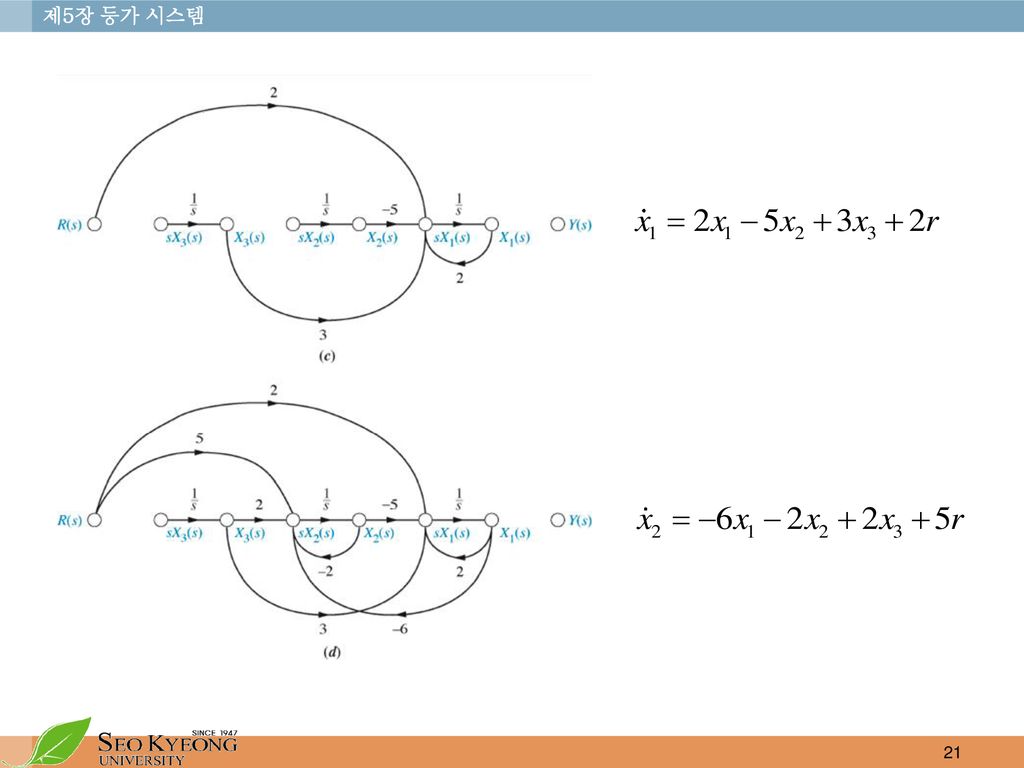
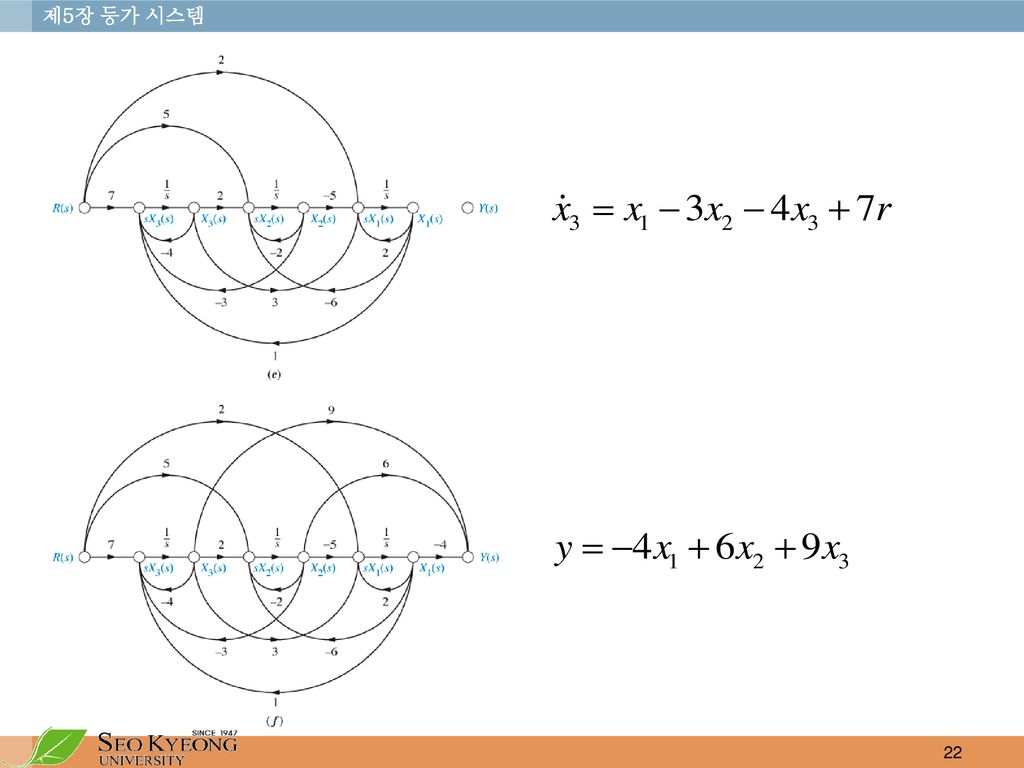
상태 방정식의 신호 흐름선도

23
상태 공간에서의 다른 표현 위상변수형 (Phase-variable (canonical) form)
The system matrix A has the coefficients of the system’s characteristic polynomial along the last row.

24
종속형 (Cascade form) Each first-order block is of the form Cross-multiplying Taking the ILT,
 Each first-order block is of the form Cross-multiplying Taking the ILT,")
25
Representation of the system
The system matrix A has the poles along the diagonal and the terms relative to the internal system itself.

26
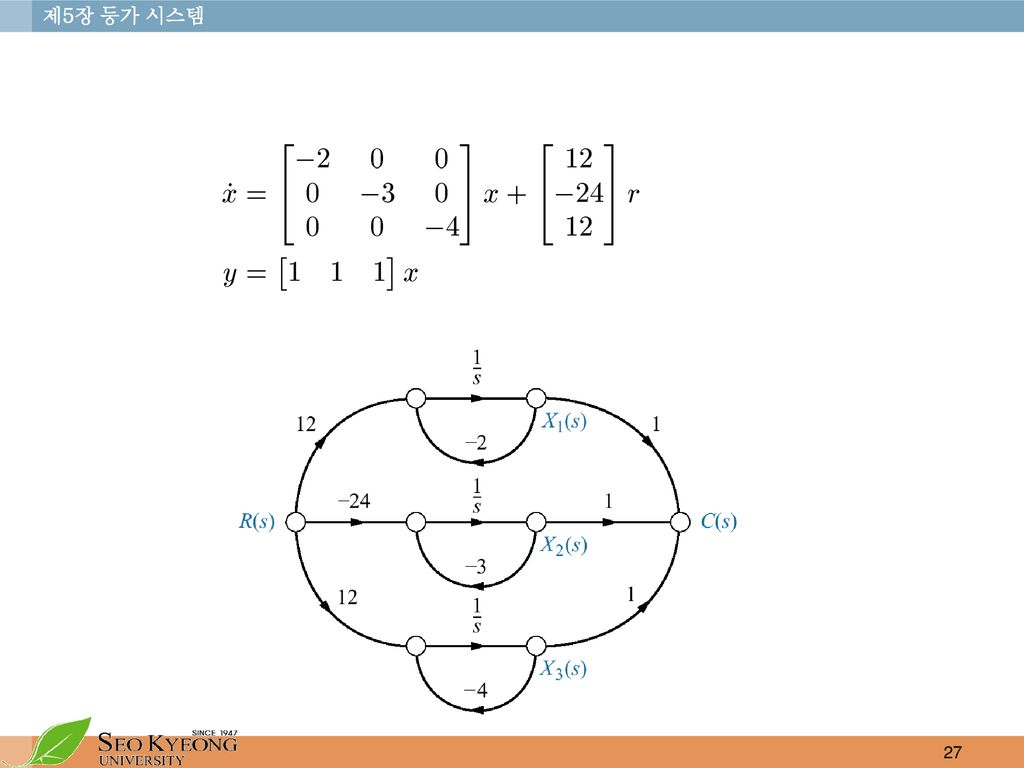
병렬형 (Parallel form) First-order pole : If no system pole is a repeated root, A matrix becomes purely diagonal by PFE. Representation of the system

28
Multiple-order poles (repeated roots)
By PFE Representation of the system

29
A matrix is called the “Jordan Canonical Form”
Not purely diagonal but the system poles along the diagonal.

30
제어기 표준형 (Controller canonical form)
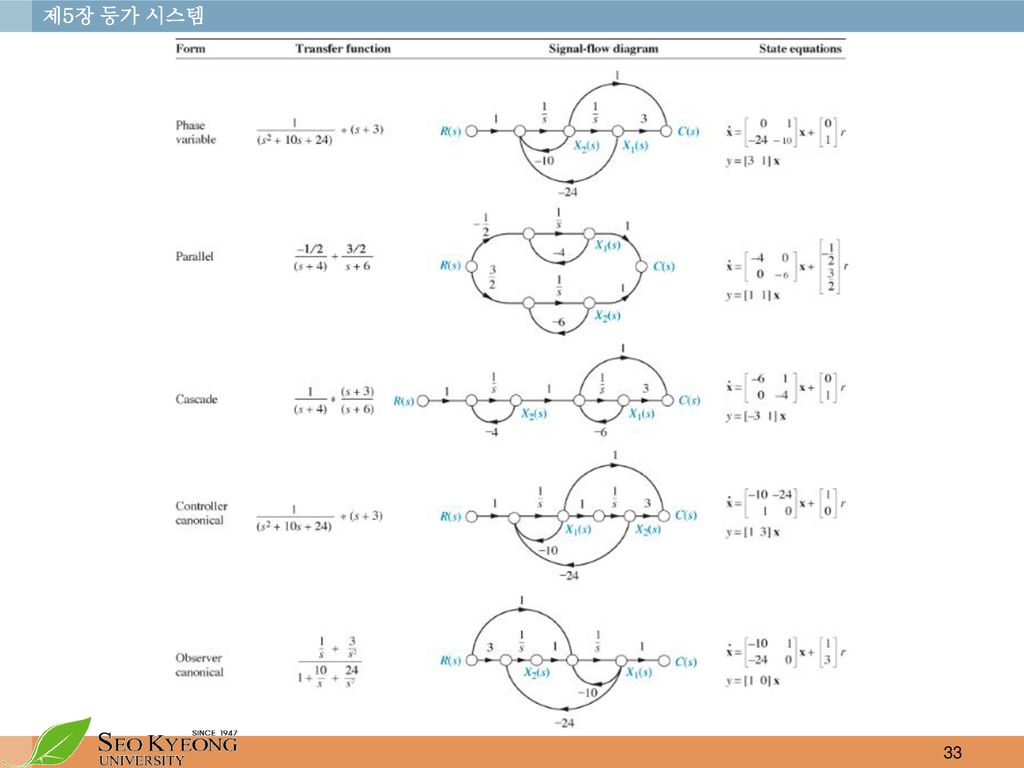
This form is obtained from the phase-variable form simply by ordering the phase-variable in the reverse order Figure a. phase-variable form b. controller canonical form

31
관측기 표준형 (Observer Canonical Form)
This is dual with the phase-variable form. Divide by Cross multiplying yields

32
* 관측기 표준형 * 제어기 표준형 * 관측기 표준형 * 제어기 표준형

34
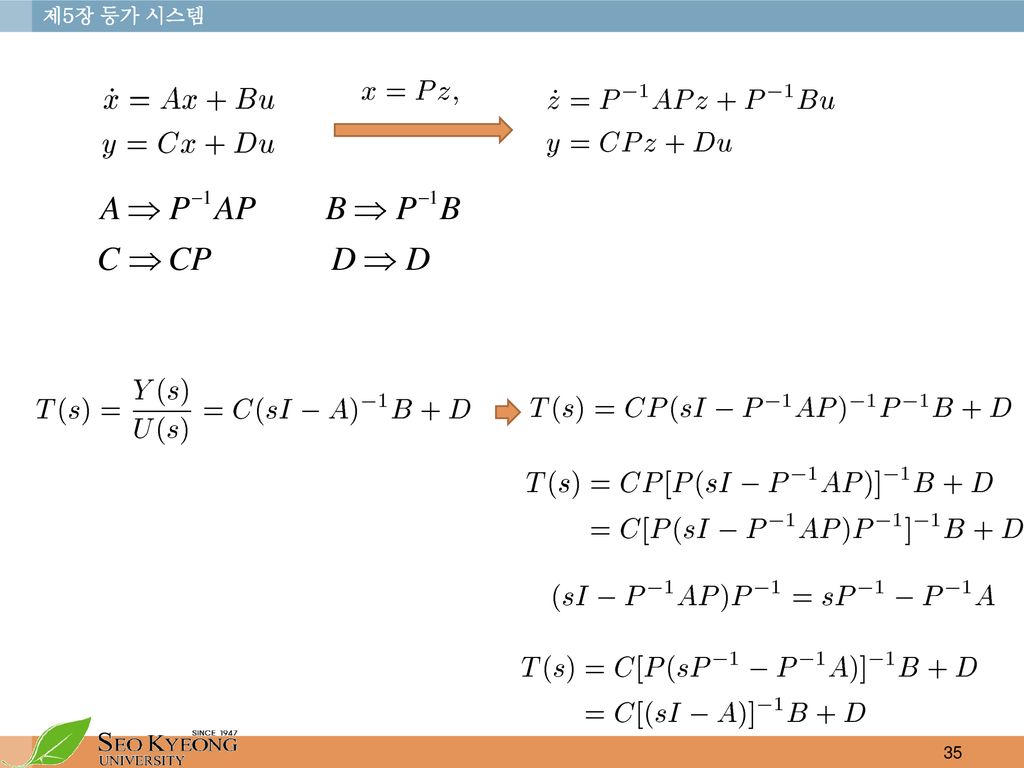
유사변환 (Similarity Transform)
전달함수는 같지만 상태 변수가 다른 시스템으로 표현 and are orthogonal; (linearly independent basis vector)
")
36
각 상태변수의 미분방정식의 해를 독립적으로 구할 수 있음 고유벡터 (eigenvector)
시스템 행렬의 대각 행렬화 각각의 상태 변수만으로 표현되는 상태 방정식 각 상태변수의 미분방정식의 해를 독립적으로 구할 수 있음 고유벡터 (eigenvector) 시스템 행렬을 대각행렬로 만드는 기저 벡터를 확장한 임의의 벡터 행렬 A의 교유벡터는 A에 의해 변환된 벡터가 원래 벡터의 상수배가 되는 xi≠0 인 모든 벡터들이다. Figure To be an eigenvector, the transformation Ax must be collinear with x; thus in (a), x is not an eigenvector; in (b), it is.
 시스템 행렬을 대각행렬로 만드는 기저 벡터를 확장한 임의의 벡터. 행렬 A의 교유벡터는 A에 의해 변환된 벡터가 원래 벡터의 상수배가 되는 xi≠0 인 모든 벡터들이다. Figure To be an eigenvector, the transformation Ax must be collinear with x; thus in (a), x is not an eigenvector; in (b), it is.")
37
고유치 (eigenvalue) 변환 행렬 행렬 A의 고유치는 xi≠0에 대하여 를 만족하는 이라 놓으면 이므로
이라 놓으면 이므로 이므로 이어야 한다. :대각선 성분이 인 대각행렬

38
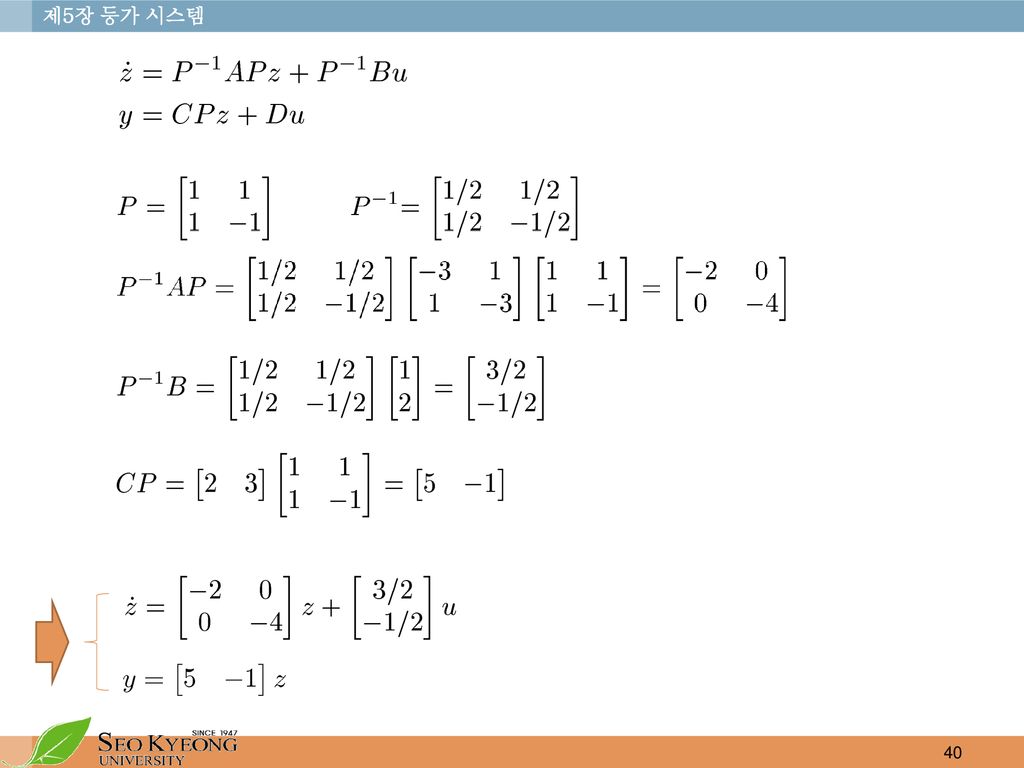
예제 5.11 시스템 행렬이 대각 행렬이 되는 시스템으로 변환
예제 시스템 행렬이 대각 행렬이 되는 시스템으로 변환 eigenvalue

39
에서 1) 2) 임의로 고유벡터를 고르면 다음과 같다.
 2) 임의로 고유벡터를 고르면 다음과 같다.")


 연속 주기 신호의 주파수 해석 Prof. Jae Young Choi ( 최재영 교수 ) Signal Processing & Systems (2014 Fall) Prof. Jae Young Choi.>")
.>")


>")





>")





 행렬의 동등(equal)>")

