Electromechanical System, Electric Machines, and Applied Mechatronics CONTENTS 7.4 Conventional three-phase syncronous machines; Dynamics in the machine variables,and in the rotor And syncronous reference frames 7.4.1 Dynamics of synchronous machines in the machine variables 7.4.2 Mathematical models of synchronous macines in the rotor and synchronous reference frames
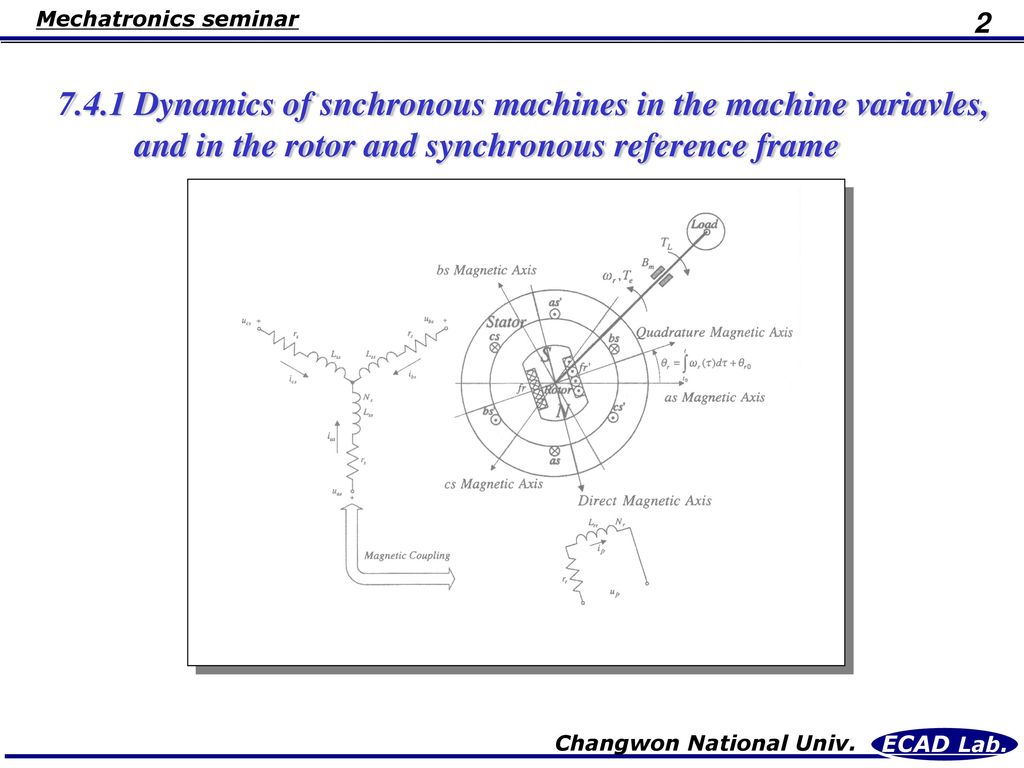
7.4.1 Dynamics of snchronous machines in the machine variavles, and in the rotor and synchronous reference frame
Voltage equation for stator windings and rotor windings Uas, ubs,and ucs, are the phase voltages in the stator windings as,bs,and cs, respectively Ias,ibs,and ics,are the phase currents in the stator windings as,bs,and cs, respectively are the stator flux linkages Ufr is the exitation voltage applide to the rotor winding fr is the rotor flux linkage rs and rr are the resistances of the stator and rotor windings, respectively
Stator and Rotor flux linkages Self component
Define , 1. Salient type 2. Round-rotor type The magnetic paths in the quadrature and direct magnetic axes are idntical
Matrix of self-and mutual Inductances Self inductance
Vector Matrix of flux linkage
Voltage equation for stator windings and rotor windings
The torsional-mechanical equation
Relation of mechanical(wrm) and electrical velocity (wrm) according to Pole number
The electromagnetic Torque
The torsional-mechanical equation
The nonlinear differential equations to map the transient dynamics of three-phase synchronous motors
Torque equation except viscous friction coefficient (Bm)
Typical torque-speed characteristic curves of synchronous motors
Example 7.6 Model a three-phase, two-pole synchronous motor with following parameters parameters 값 단위 Rs 0.25 [ohm] Rr 0.47 [H] Lls 0.0001 Lmq 0.00095 Lmd Llf 0.00022 Lmf 0.00035 J 0.003 [Kg-m2] Bm 0.00072 [N-m-s-rad-1]
The field voltage is ufr=5V The load conditions are specified as
MATLAB script crm_01.m tspan=[0 0.5];y0=[0 0 0 0 0 0]'; options=odeset('RelTol',5e-3,'AbsTol',[1e-4 1e-4 1e-4 1e-4 1e-4 1e-4]); [t,y] = ODE45('crm_02',tspan,y0,options); subplot(3,2,1); plot(t,y(:,1)); ylabel('ias'); axis([0,0.3,-500,500]); grid; subplot(3,2,3); plot(t,y(:,2)); ylabel('ibs'); axis([0,0.3,-500,500]); grid; subplot(3,2,5); plot(t,y(:,3)); ylabel('ics'); axis([0,0.3,-500,500]); grid; subplot(3,2,2); plot(t,y(:,4)); ylabel('ifr'); axis([0,0.3,-200,200]); grid; subplot(3,2,4); plot(t,y(:,5)); ylabel('wr'); axis([0,0.3,0,400]); grid; subplot(3,2,6); plot(t,y(:,6)); ylabel('Q'); axis([0,0.3,0,200]); grid;
MATLAB script crm_02.m function yprime=difer(t,y); Lls=0.0001;Lmqs=0.00095;Lmds=0.00095; Llf=0.00022;Lmf=0.0001; Lmd=0.00035; Lmb=(Lmqs+Lmds)/3; rs=0.25;rr=0.47; J=0.003;Bm=0.00072; P=2; um=sqrt(2)*150;w=377; ufr=5; if t<=0.2; T1=0; else T1=1; end
uas=um*cos(w*t); ubs=um*cos(w*t-2*pi/3); ucs=um*cos(w*t+2*pi/3); Ld=2*Lls*Lmd^2;Ldr=2*Lls*Lmd; Lss=(-3*Lmb^2-4*Lls^2-8*Lls*Lmb)*(Lmf+Llf)+3*Lmd^2*Lmb+4*Lls*Lmd^2; Ldens=(2*Lls+3*Lmb)*((-2*Lls^2-3*Lmb*Lls)*(Llf+Lmf)+3*Lmd^2*Lls); Ldenr=(-2*Lls^2-3*Lmb*Lls)*(Llf+Lmf)+3*Lmd^2*Lls; Lms=(-3*Lmb^2-2*Lls*Lmb)*(Lmf+Llf)+3*Lmd^2*Lmb+Lls*Lmd^2; Lrr=6*Lls*Lmd*Lmb+4*Lls^2*Lmd; Llr=-(2*Lls^2+3*Lmb*Lls); S1=sin(y(6,:)); S2=sin(y(6,:)-2*pi/3);S3=sin(y(6,:)+2*pi/3); IUas=-rs*y(1,:)+uas;IUbs=-rs*y(2,:)+ubs;IUcs=-rs*y(3,:)+ucs; IUfr=-rr*y(4,:)+ufr; C1=cos(y(6,:));C2=cos(y(6,:)-2*pi/3);C3=cos(y(6,:)+2*pi/3); C12=cos(2*y(6,:));C22=cos(2*y(6,:)-2*pi/3);C32=cos(2*y(6,:)+2*pi/3); Nsts=(-6*Lmd^2*Lls*Lmb-4*Lmd^2*Lls^2)*y(5,:).*(C1.*y(1,:)+C2.*y(2,:)+ C3.*y(3,:)); Nstr=(3*Lmd*Lmb*Lls+2*Lmd*Lls^2)*y(5,:).*(C1.*y(1,:)+C2.*y(2,:)+C3.*y(3,:)); Nct=((6*Lmd*Lls*Lmb+4*Lmd*Lls^2)*(Llf+Lmf)-6*Lmd^3*Lls)*y(5,:).*y(4,:); Te=P*(Lmd*y(4,:).*(y(1,:).*C1+y(2,:).*C2+y(3,:).*C3))/2;
yprime=[((Lss+Ld. C12). IUas+(Lms+Ld. C22). IUbs+(Lms+Ld. C32) yprime=[((Lss+Ld*C12).*IUas+(Lms+Ld*C22).*IUbs+(Lms+Ld*C32).*IUcs+Lrr*S1.*IUfr+Nsts.*S1+Nct.*C1)/Ldens;... ((Lms+Ld*C22).*IUas+(Lss+Ld*C32).*IUbs+(Lms+Ld*C12).*IUcs+Lrr*S2.*IUfr+Nsts.*S2+Nct.*C2)/Ldens;... ((Lms+Ld*C32).*IUas+(Lms+Ld*C12).*IUbs+(Lss+Ld*C22).*IUcs+Lrr*S3.*IUfr+Nsts.*S3+Nct.*C3)/Ldens;... (Ldr*S1.*IUas+Ldr*S2.*IUbs+Ldr*S3.*IUcs+Llr*IUfr+Nstr)/Ldenr;... (P*Te-2*Bm*y(5,:)-P*T1)/(2*J);... y(5,:)];
Dynamics of three-phase synchronous generators
Voltage equation for stator windings and rotor windings
The nonlinear differential equations to map the transient dynamics of three-phase synchronous generators
7.4.2 Mathematical models of synchronous machines in the rotor and synchronous referencd frames -교류 전동기는 전동기의 인덕턴스가 전동기 속도에 관한 함수로 나타난다 -교류 전동기의 전압 방정식은 전동기가 정지하고 있는 경우를 제외하면, 시변 미분 방정식으로 나타나게 된다 변수의 변환은 이러한 복잡한 시변 미분 방정식을 보다 쉽게 해석하기 위함 3상 교류 전동기의 a,b,c상의 변수들을 d,q,n의 직교 좌표계상의 변수로 변환 D축:여자자속이 존재하는축 , q축:d축과 직각을 이루는 축 N축:d-q축과 3차원 공간 상에서 서로 직교하는 축(회전자계의 형성에는 기여하지 않는다)
The Park transformation Making use of the Park transformation The rotor reference frame
The electromagnetic torque by using the Park transformation The torsional-mechanical dynamics for conventional synchronous motors