Download presentation
Presentation is loading. Please wait.

1
자동제어공학 3. 물리적 시스템의 상태방정식 정 우 용

2
제3장 물리적 시스템의 상태방정식 (State Equations for Physical Systems)
개요 개념정립 일반적인 상태 공간 표현법 전달 함수를 상태 공간 표현식으로 변환 상태 공간에서 표현된 방정식을 전달함수로 변환

3
개 요 Classical Control Frequency domain
개 요 Classical Control Frequency domain Only for linear, time-invariant system (LTI System) Easy understanding (graphical analysis possible) Both zeros and poles obtainable Difficult prediction of the behavior of higher orders poles (usually for up to second-order poles) Modern control Time domain (or state-space domain) Unified method Extended to nonlinear, time-varying system Multi-input, multi-output systems Easy computer installation It may be sensitive to parameter changes (no specification of closed-loop zeros)
 Easy understanding (graphical analysis possible) Both zeros and poles obtainable. Difficult prediction of the behavior of higher orders poles (usually for up to second-order poles) Modern control. Time domain (or state-space domain) Unified method. Extended to nonlinear, time-varying system. Multi-input, multi-output systems. Easy computer installation. It may be sensitive to parameter changes. (no specification of closed-loop zeros)")
4
개념 정립 시스템의 상태 공간에서 표현 시스템을 상태 방정식과 출력 방정식으로 표현 상태변수 (state variable)
가능한 모든 시스템 변수 중 시스템 특성을 나타내는데 필요한 최소한의 변수들 상태방정식 (state equation) 시스템의 차수가 n인 경우, 상태 변수에 대한 n개의 1차 연립 미분 방정식 출력방정식 (output equation) 시스템의 다른 변수들을 t≥t0 에서 구하기 위한 시스템 입력과 상태 변수들로 구성되는 대수 방정식
 시스템의 차수가 n인 경우, 상태 변수에 대한. n개의 1차 연립 미분 방정식. 출력방정식 (output equation) 시스템의 다른 변수들을 t≥t0 에서 구하기 위한 시스템. 입력과 상태 변수들로 구성되는 대수 방정식.")
5
RL 회로 (초기 전류 i(0)) 1. 상태변수 i(t) 2. 루프 방정식
) 1. 상태변수 i(t) 2. 루프 방정식")
6
3. 초기조건 포함 및 Laplace 변환 입력 v(t)가 단위 계단 함수 u(t) V(s)=1/s
가 단위 계단 함수 u(t) V(s)=1/s")
7
4. 다른 변수들은 i(t)와 v(t)의 대수식으로 구함
5. 회로망의 상태 공간에서의 표현 상태방정식 출력방정식

8
RLC 회로 1. 2차두 개의 상태 변수[i(t),q(t)] 2. 루프 방정식
n차 미분방정식 n개의 1차 연립 미분 방정식으로 변환 상태방정식
![RLC 회로 1. 2차두 개의 상태 변수[i(t),q(t)] 2. 루프 방정식](http://slidesplayer.org/slide/16619772/96/images/8/RLC+%ED%9A%8C%EB%A1%9C+1.+2%EC%B0%A8%EF%83%A0%EB%91%90+%EA%B0%9C%EC%9D%98+%EC%83%81%ED%83%9C+%EB%B3%80%EC%88%98%5Bi%28t%29%2Cq%28t%29%5D+2.+%EB%A3%A8%ED%94%84+%EB%B0%A9%EC%A0%95%EC%8B%9D.jpg "n차 미분방정식 n개의 1차 연립 미분 방정식으로 변환. 상태방정식.")
9
3. 초기조건 포함 및 Laplace 변환 초기상태 : q(t), i(t) 입력 : v(t) 4. 다른 변수들은 i(t)와 v(t)의 대수식으로 구함 위식에서 vL(t)는 상태 변수인 q(t), i(t)와 입력전압 v(t)의 선형결합이므로 출력방정식이 된다. 5. 상태 방정식과 출력방정식은 회로망을 상태 공간에서 나타내는 식이 됨 출력방정식

10
상태 변수 선정의 제약 조건 n 차 시스템은 최소 n개의 상태변수로서 나타낼 수 있다 최소 수의 상태변수들은 서로 선형 독립적 (linearly independent) 어떤 변수가 다른 상태 변수들의 선형 결합으로 표시되면 그 변수는 상태 변수가 될 수 없다. 예) vR(t)과 i(t)는 vR(t)=R i(t) 의 선형 결합, 따라서 안됨 (선형 종속, linearly dependent) 선형 시스템과 벡터-행렬식 시스템이 선형이면 상태 방정식과 출력 방정식은 백터-행렬식으로 나타낼 수도 있다.
 vR(t)과 i(t)는 vR(t)=R i(t) 의 선형 결합, 따라서 안됨. (선형 종속, linearly dependent) 선형 시스템과 벡터-행렬식. 시스템이 선형이면 상태 방정식과 출력 방정식은. 백터-행렬식으로 나타낼 수도 있다.")
11
벡터 –행렬식으로 표현 (In Matrix form)
상태방정식 출력방정식 상태방정식 출력방정식

12
Linearly independent state variables
일반적인 상태 공간 표현법 where : state vector : time derivative of x : output vector : input vector : system matrix and input coupling matrix : output matrix and feedforward matrix Linearly independent state variables 12

13
상태 공간 표현의 응용 선형 독립 상태 변수 변수 사이의 관계가 미분 관계이면 변수들은 선형 독립 상태 변수의 최소 수
일반적으로 요구되는 상태 변수의 최소 수는 시스템을 나타내는 미분 방정식의 차수와 같다.

14
예제 3.1 저항에 흐르는 전류를 출력으로 할 때 상태 공간으로 표현 1. 전류표시: 2. 미분 방정식을 세우고 상태 변수를 선정

15
3. 상태변수 나타내기 (Kirchhoff 법칙)
4. 상태방정식 5. 출력방정식 : iR(t)
")
16
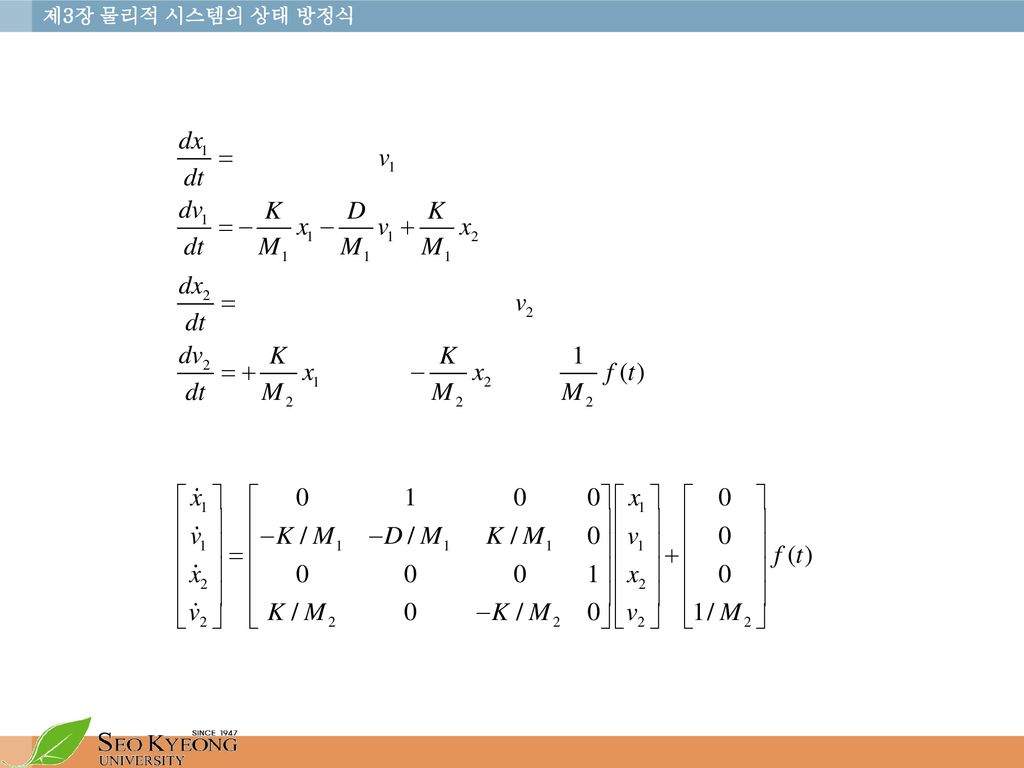
예제 3.3 병진운동하는 기계 시스템의 상태 방정식

18
전달 함수를 상태 공간 표현식으로 변환 위상변수 (phase variable)
각 변수의 관계가 1차 미분 관계로 정의되는 상태 변수 집합

19
상태 방정식 출력 방정식

20
예제 3.4 전달함수를 상태 공간에서 위상 변수형으로 나타내라
초기조건을 0이라 가정하고 Laplace 역변환

21
Transfer function form (전달함수)
Block diagram form (위상 변수형으로 나타내기 위한 등가 블록도)
")
22
다항식의 분자항을 가지는 전달함수의 상태공간에서 표현

23
상태방정식 (동일) 출력방정식
 출력방정식")
24
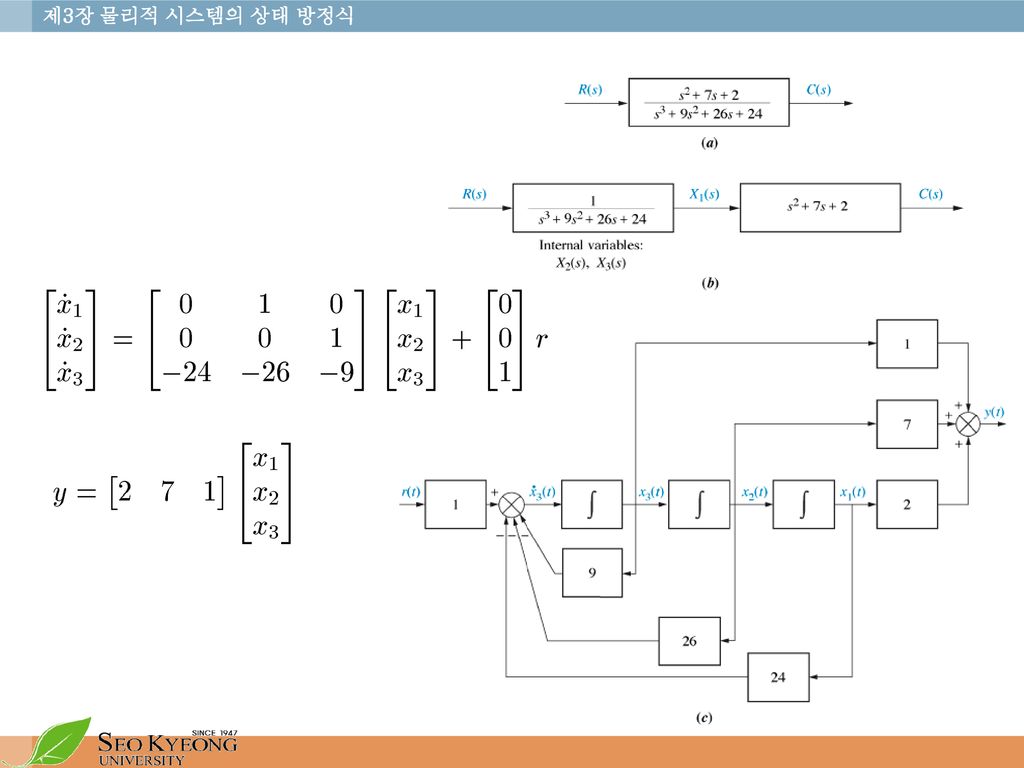
예제 3.5 다항식의 분자항을 가지는 전달함수의 상태공간에서 표현

26
상태 공간에서 표현된 방정식을 전달함수로 변환
초기 조건이 0이라 가정하고 이 시스템을 Laplace 변환 여기서 는 단위 행렬 (identity matrix )
")
27
예제 전달함수 를 구하라

Similar presentations


>")


>")

>")



>")


![컴퓨터 프로그래밍 기초 [Final] 기말고사](/90/14529968/big_thumb.jpg "컴퓨터 프로그래밍 기초 [Final] 기말고사>")



 행렬의 동등(equal)>")
