Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 사양 ㆍ 사이즈 : 80 x 80 mm ㆍ 채널 : 초음파 1~8 개 (HG-LB40C-5V, HG-LB40A-5V 모델만 사용 가능 ) ㆍ 전원 : DC 12V(DC Jack 컨넥터 1 개, 2 핀 컨넥터 1 개 ), DC5V(2 핀 커넥터 1 개 ) ㆍ 출력 : RS232(9 핀 DSUB 1 개, 3 핀 컨넥터 1 개 ), UART(3 핀 컨넥터 1 개 ) 통신 설정 ㆍ Default Baudrate : bps * (LED ON 을 통해 현재 Baudrate 확인 ) 1: 9600( ), 2:19200, 3:38400, 4:57600 ㆍ Data bit : 8 bit ㆍ Stop bit : 1 bit ㆍ Parity bit : None ㆍ Hardware Flow control : None
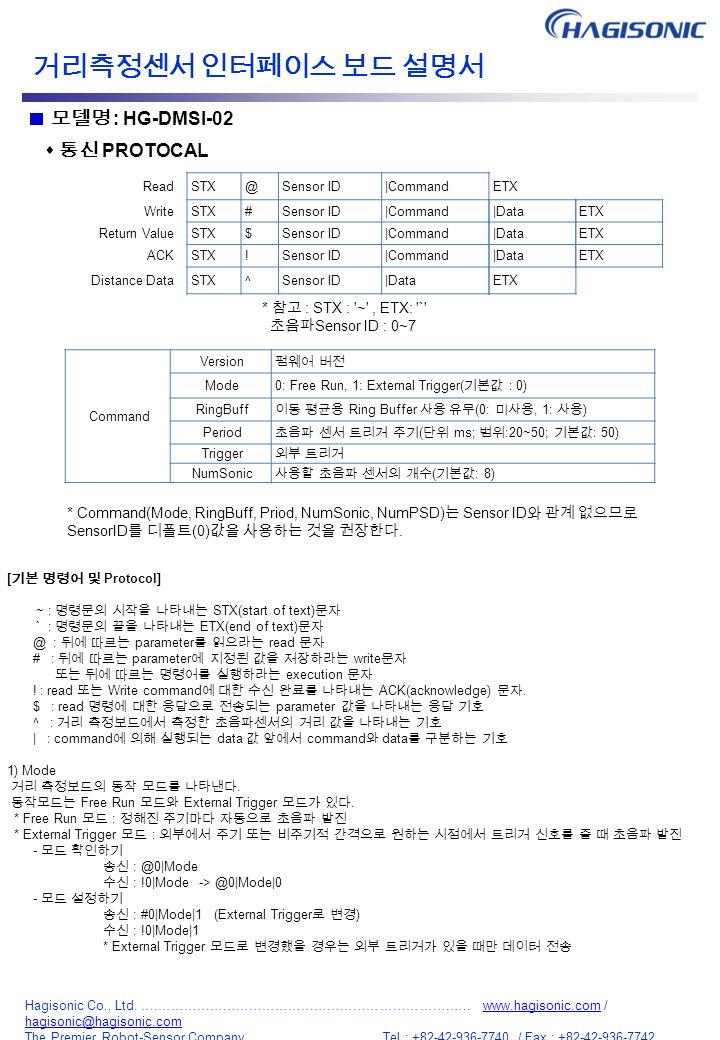
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 통신 PROTOCAL * 참고 : STX : '~', ETX: '`' 초음파 Sensor ID : 0~7 ID|Command STX#Sensor ID|Command STX$Sensor ID|Command STX!Sensor ID|Command STX^Sensor ID|Data Read Write Return Value ACK Distance Data ETX |Data ETX Command Version 펌웨어 버전 Mode 0: Free Run, 1: External Trigger( 기본값 : 0) RingBuff 이동 평균용 Ring Buffer 사용 유무 (0: 미사용, 1: 사용 ) Period 초음파 센서 트리거 주기 ( 단위 ms; 범위 :20~50; 기본값 : 50) Trigger 외부 트리거 NumSonic 사용할 초음파 센서의 개수 ( 기본값 : 8) * Command(Mode, RingBuff, Priod, NumSonic, NumPSD) 는 Sensor ID 와 관계 없으므로 SensorID 를 디폴트 (0) 값을 사용하는 것을 권장한다. [ 기본 명령어 및 Protocol] ~ : 명령문의 시작을 나타내는 STX(start of text) 문자 ` : 명령문의 끝을 나타내는 ETX(end of text) : 뒤에 따르는 parameter 를 읽으라는 read 문자 # : 뒤에 따르는 parameter 에 지정된 값을 저장하라는 write 문자 또는 뒤에 따르는 명령어를 실행하라는 execution 문자 ! : read 또는 Write command 에 대한 수신 완료를 나타내는 ACK(acknowledge) 문자. $ : read 명령에 대한 응답으로 전송되는 parameter 값을 나타내는 응답 기호 ^ : 거리 측정보드에서 측정한 초음파센서의 거리 값을 나타내는 기호 | : command 에 의해 실행되는 data 값 앞에서 command 와 data 를 구분하는 기호 1) Mode 거리 측정보드의 동작 모드를 나타낸다. 동작모드는 Free Run 모드와 External Trigger 모드가 있다. * Free Run 모드 : 정해진 주기마다 자동으로 초음파 발진 * External Trigger 모드 : 외부에서 주기 또는 비주기적 간격으로 원하는 시점에서 트리거 신호를 줄 때 초음파 발진 - 모드 확인하기 송신 수신 : !0|Mode - 모드 설정하기 송신 : #0|Mode|1 (External Trigger 로 변경 ) 수신 : !0|Mode|1 * External Trigger 모드로 변경했을 경우는 외부 트리거가 있을 때만 데이터 전송
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 통신 PROTOCAL 2) RingBuff 거리측정보드 내부에서 사용하는 알고리즘에서 Ring Buffer 의 사용유무를 나타낸다 외부트리거를 사용하고, 트리거 주기가 느릴 경우에는 RingBuffer 를 사용하게 되면 수렴이 늦게 되므로 RingBuffer 를 사용하지 않는 것이 좋다. 단, 이때 정밀도는 떨어지게 된다. - RingBuff 확인하기 송신 수신 : !0|RingBuff - RingBuff 설정하기 송신 : #0|RingBuff|0 (Ring Buffer 사용안함으로 변경 ) 수신 : !0|RingBuff|0 3) BaudRate 거리측정보드의 통신속도를 나타낸다 - BaudRate 확인하기 송신 수신 : !0|BaudRate - BaudRate 설정하기 송신 : #0|BaudRate|9600 ( 통신속도를 9600 으로 변경 ) 수신 : !0|BaudRate|9600 4) Period 거리측정보드의 트리거 주기를 나타낸다 - Period 확인하기 송신 수신 : !0|Period - Period 설정하기 송신 : #0|Period|20 ( 트리거 주기를 20ms 로 변경 ) 수신 : !0|Period|20 5) Trigger 초음파센서 모듈을 트리거 한다. - 3 번 초음파센서 Trigger 하기 송신 : #3|Trigger ( 초음파센서를 발진시킨다 ) 수신 : ^3|365 ( 거리 365mm) 6) NumSonic 거리 측정보드에서 사용할 초음파센서의 개수를 설정한다. - 2 개 초음파센서 사용 송신 : #0|NumSonic|2 수신 : !0|NumSonic|2
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 보드설명 12V 전원 +12V GND 전원 스위치 전원 스위치 RESET 2 번 : Tx (MCU PC) 3 번 : Rx (MCU PC) 5 번 : GND 2 번 : Tx (MCU PC) 3 번 : Rx (MCU PC) 5 번 : GND ID5 ID4 ID6 ID7 초음파센서 ID0 ID1 ID2 ID3 RS232 DC 12V 5V 전원 5V 전원 RX TX GND +5V GND +5V GND 초음파센서 GND VCC SIG GND TRG RS232
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 초음파센서 (HG-B40) 연결 방법 HG-LB40C-5V Or HG-LB40A-5V GND VCC SIG GND TRG GND TRG GND VCC SIG
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 모니터 프로그램 사용 방법 1) 모니터 프로그램 구성 ① 초음파센서 사용 개수 설정 영역 ② 통신 포트 및 통신 속도 설정 영역 ③ 초음파 센서로부터 측정된 거리데이터 디스플레이 영역 ④ 초음파 내부 파라미터 설정 영역 ⑤ 측정한 거리데이터를 파일로 저장 영역 ⑥ 초음파 센서의 거리 환산 파라미터 Calibration( 교정 ) 영역
Hagisonic Co., Ltd. ….………………………………………………………….….. / The Premier Robot-Sensor Company Tel : / Fax : 거리측정센서 인터페이스 보드 설명서 모델명 : HG-DMSI-02 모니터 프로그램 사용 방법 ( 계속 ) 2) 사용 방법 ① 초음파센서 개수 설정 - 구성①의 EditBox 에 사용할 센서의 개수 (1~8) 를 입력하고 옆에 확인 버튼을 클릭한다. ② 초음파센서의 측정 주기 설정 - 구성④의 Period 옆의 EditBox 에 측정주기 (20~50) 를 입력하고 Send 버튼을 누른다. (20ms ~50ms) ③ 필터 사용 결정 ( 이동 평균 ) - 구성④의 Ring Buffer 옆의 Not Use( 비 사용 ) 와 Use( 사용 ) 버튼을 이용해서 사용을 결정할 수 있다. ④ 사용 모드 결정 - 자동 측정 모드 (Free Run): 거리 측정보드가 초음파센서에 Trigger 신호를 입력하여, 주기적으로 초음파센 서의 거리를 측정하는 모드이고, 구성④의 Mode 옆에 Fee Run 버튼을 클릭하여 설정할 수 있다. - 외부 Trigger 측정 모드 (Ext Trigger): 외부의 입력을 받아 거리측정보드가 특정 초음파센서에 Trigger 를 입 력하여, 한 번의 거리를 측정하는 모드이고, 구성④의 Mode 옆에 Ext Trigger 버튼을 클릭하여 설정할 수 있 다. (* 외부 Trigger 측정 모드 사용 시 Trigger 주기가 느릴 경우 Ring Buffer 를 사용하지 않는 것을 권장합니다.) ⑤거리 측정보드의 파라미터 값 확인 - 구성④의 Mode, Ring Buffer, Period, 옆 부분의 Get 버튼을 클릭하여 확인할 수 있다. ⑥측정 데이터 기록방법 - 구성⑤의 기록파일 버튼을 클릭하여 파일을 생성하고, 데이터 기록 시작 시점에 구성⑤의 기록시작 버튼을 누르고, 데이터 기록 종료 시점에 구성⑤의 기록종료 버튼을 누르면 된다. ⑦ Calibration( 교정 ) - 초음파는 주의 환경에 영향을 받으며, 초음파 센서 제작 시 미세한 특성 차이를 갖는다. 따라서 다른 초음 파센서를 같은 파라미터를 이용해 거리를 환산 한다면, 거리 측정이 부정확해 질 수 있다. 따라서 파라미터를 교정해 줄 필요가 있다. ⅰ ) 빈 공간에 초음파센서와 장애물을 일직선으로 설치 한다. ⅱ ) 초음파센서로부터 장애물까지 실제거리를 측정한다. ⅲ ) 구성⑥의 Distance1 옆 EditBox 에 측정한 거리를 입력한 후 Distance1 옆의 Get 버튼을 누른다. iv) 장애물 위치를 변경후 i)~ii) 과정을 반복하고, 이번에 얻은 값을 Distance2 옆 EditBox 에 입력후 Get 버튼 을 누른다. v) 마지막으로 Calibration 버튼을 누른다. ※ 초음파센서와 거리측정보드를 같이 구매 시 Calibration 이 되어 출고되기 때문에, 사용 중인 초음파센서의 채널을 변경하거나, 초음파센서와 거리측정보드를 같이 구매 하지 않았을 경우에만 Calibration 하여 사용하 기 바랍니다.