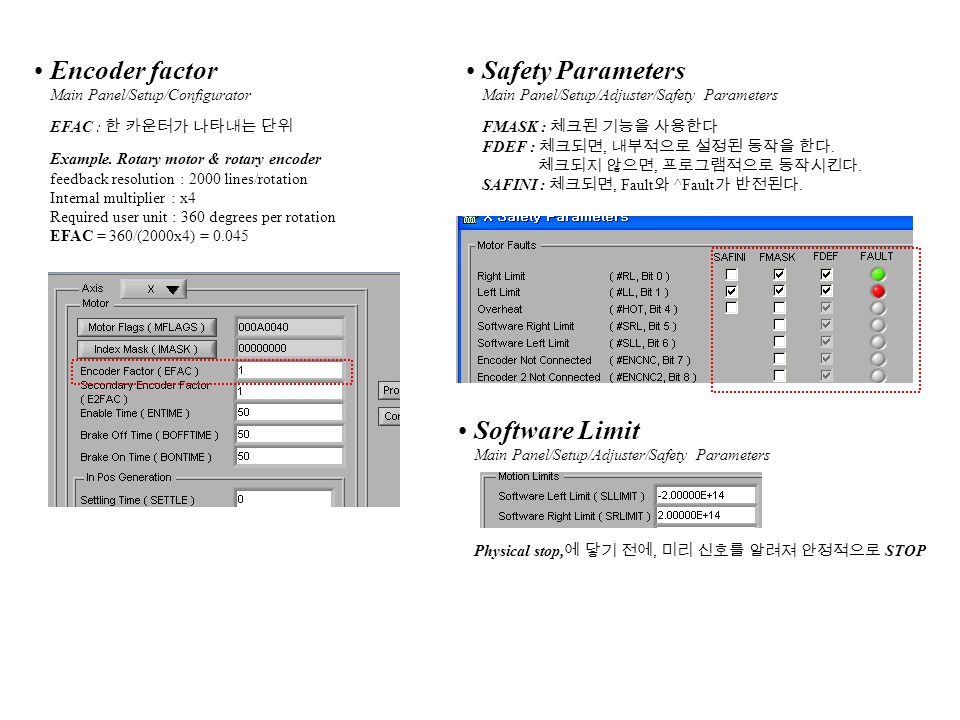
Encoder factor Main Panel/Setup/Configurator EFAC : 한 카운터가 나타내는 단위 Example. Rotary motor & rotary encoder feedback resolution : 2000 lines/rotation Internal multiplier : x4 Required user unit : 360 degrees per rotation EFAC = 360/(2000x4) = Safety Parameters Main Panel/Setup/Adjuster/Safety Parameters FMASK : 체크된 기능을 사용한다 FDEF : 체크되면, 내부적으로 설정된 동작을 한다. 체크되지 않으면, 프로그램적으로 동작시킨다. SAFINI : 체크되면, Fault 와 ^Fault 가 반전된다. Software Limit Main Panel/Setup/Adjuster/Safety Parameters Physical stop, 에 닿기 전에, 미리 신호를 알려져 안정적으로 STOP
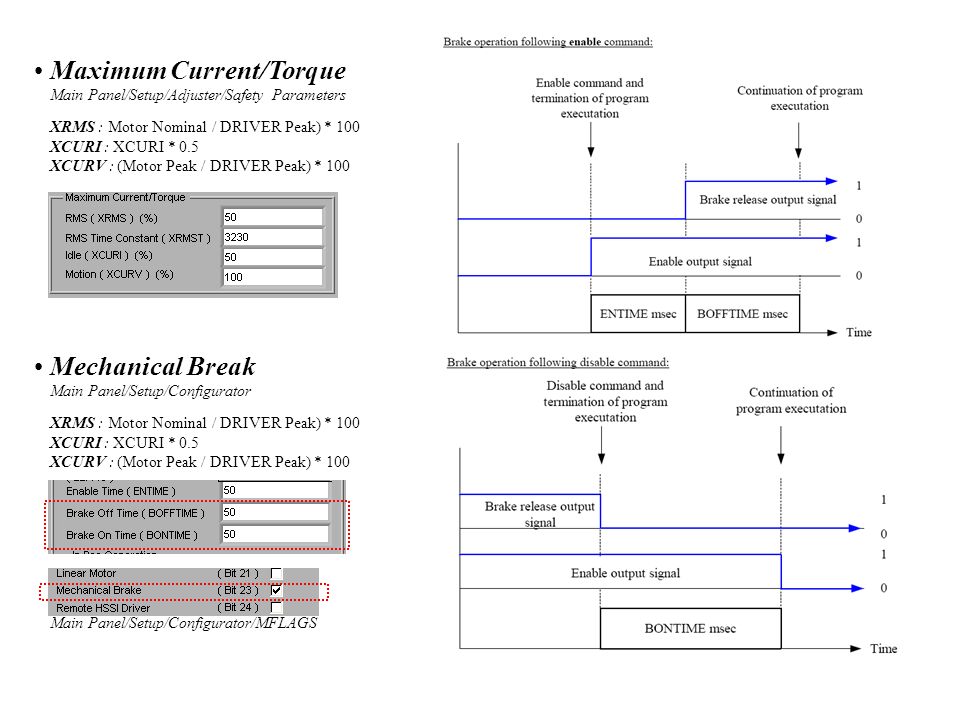
Maximum Current/Torque Main Panel/Setup/Adjuster/Safety Parameters XRMS : Motor Nominal / DRIVER Peak) * 100 XCURI : XCURI * 0.5 XCURV : (Motor Peak / DRIVER Peak) * 100 Mechanical Break Main Panel/Setup/Configurator XRMS : Motor Nominal / DRIVER Peak) * 100 XCURI : XCURI * 0.5 XCURV : (Motor Peak / DRIVER Peak) * 100 Main Panel/Setup/Configurator/MFLAGS
Axis Setup - General Main Panel/Setup/Adjuster/Axis Setup/General Control – Single loop Control, Dual loop Control Single loop – 하나의 motor 에 하나의 encoder 를 사용하여 위치 제어 Dual loop – 하나의 motor 에 두개의 encoder 를 사용하여 속도와 위치제어 Connection – Direct, Remote Direct – Controller 가 Drive Port 를 사용할 경우 Remote – HSSI Module 을 사용할 경우 Axis Setup - Drive Main Panel/Setup/Adjuster/Axis Setup/Drive Type – DC 1-input, 3Phase 2-input, 3Phase 1-input DC 1-input – Drive 를 따로 갖춘 DC Motor 사용 시 3Phase 2-input, Commutation by Controller – CM 내부의 Drive 를 사용하는 AC Servo/BLDC Motor 3Pahse 1-input, Commutation by Amplifier – Drive 를 따로 갖춘 AC Servo/BLDC Motor Axis Setup - Motor Main Panel/Setup/Adjuster/Axis Setup/Motor Topology – Rotary, Linear Type – DC Brush, DC Brushless / AC Servo Axis Setup – Position Feedback Main Panel/Setup/Adjuster/Axis Setup/Position Feedback Topology – Rotary, Linear Type – Quadrature, Up-Down, Pulse-Direction, SIN-COS, Analog
Axis Setup Main Panel/Setup/Adjuster/Axis Setup
Stepper Drives(Pulse-Direction) Main Panel/Setup/Configurator/MFLAGS Control – Stepper-To-Encoder Loop, Stepper with Encoder Feedback Stepper-To-Encoder Loop – 입력 스텝이 곧 피드백 값이다 Stepper with Encoder Feedback – 외부에 Encoder 를 장착한다. Main Panel/Setup/Configurator/MFLAGS
Open-Loop Verification 1. Motor Enable 한다. 2. Drive Output Range(%) 를 10% 로 맞춘다. 3. 조심스럽게 움직여 본다. 모터 폭주 주위 4. 엔코더 방향과 모터 방향이 같은지 본다. 5. 만약 다르다면 Feedback Configuration 을 연다.
Velocity Loop Tuning Velocity Loop Tuning 을 클릭 Motion limited by 를 Time Period 혹은 Between two Points 중에 하나를 선택한다. LPF Bandwidth 를 650 으로 셋 한다. Integrator Gain 을 0 으로 셋 한다. Velocity Gain 을 100 으로 셋 한다. Integrator Limit 를 50% 로 셋 한다. Velocity 를 최고의 10% 만큼 변화시킨다. Scope AutoSet 을 클릭한다. Motor 를 Enable 하고 Run 한다. Velocity Gain 을 두배로 늘린다. Integrator Gain 을 오버슈터가 10-20% 내로 들어오도 록 계속 증가시킨다. Integrator Bandwidth 는 50Hz 를 넘지 안도록 한다. (Integrator Gain/20 = Integrator bandwidth)
Position Loop Tuning Position Loop Tuning 을 클릭 Select motion : Between two points, Positive direction only, Negative direction only First point, Second point 설정 Velocity, Acceleration, Deceleration 을 원하는 동작의 최고값의 50% 값으로 설정 Scope Autoset 클릭 Motor Enable & Run Position Gain 을 Position Error 가 설정치를 벗어나지 않을 만큼 계속 증가시킨다.
Current Loop Tuning Integrator Gain = 0 Set Gain = 1000 Set % of Peak Current = 10 Pulse Length = 4 Scope Autoset 클릭 약간의 Overshoot 가 발생할 때까지 Gain 증가 Overshoot 가 10~20% 내로 계속 증가 위의 두 과정을 반복 ( 만족할 때까지 )