Modern Control System Lab. Changwon National University Pendulum Design
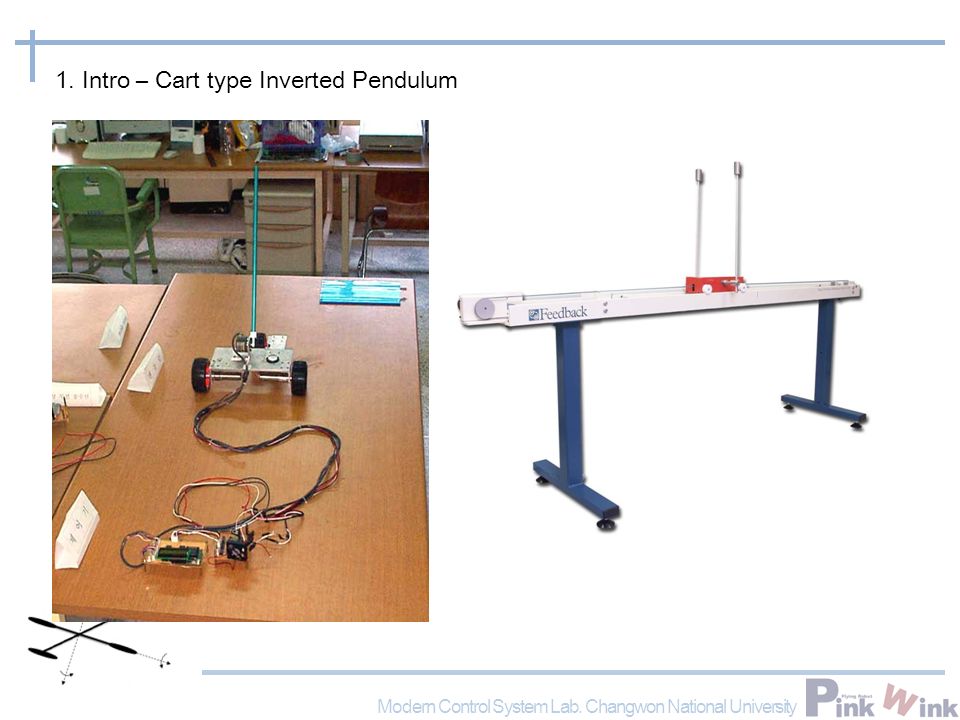
Modern Control System Lab. Changwon National University 1. Intro – Cart type Inverted Pendulum
Modern Control System Lab. Changwon National University 1. Intro – Rotary type Inverted Pendulum
Modern Control System Lab. Changwon National University 1. Intro – Balancing Robot
Modern Control System Lab. Changwon National University 2. Project selection Cart TypeRotary TypeBal-Bot 장점 - 동역학 유도가 가장 용이 - 기구부 파손 가능성이 가장 작음 - 제어기 구성이 용이한 편 - 기구구성이 가장 용이 - 구동부 구성이 가장 용이 - 제작자 만족도 높음 - 가장 작은 기구부 구성 가능 단점 - 구동부의 구성이 조금 불편함 - 기구 크기가 상대적으로 커짐 - 동역학 구성이 약간 난해함 - 잘못된 설계로 인한 기구파손 위험 - 센서구성이 가장 어려움 - 기구부 구성이 가장 어려움 - 동역학 구성이 가장 난해함
Modern Control System Lab. Changwon National University 3. Body Design
Modern Control System Lab. Changwon National University 4. Sensor Selection 포텐셔미터인크리멘털형 엔코더 앱솔루트형 엔코더
Modern Control System Lab. Changwon National University 4. Sensor Selection 포텐셔미터인크리멘털 엔코더앱솔루트 엔코더 장점 - 구현이 가장 간단함 - 절대각도를 알 수 있음 - 노이즈에 강함 - 전체 각도를 모두 측정 가능 - 노이즈에 강함 - 절대각도를 알 수 있음 단점 -ADC 의 사용으로 인한 노이즈 - 사각이 존재함 - 엔코더보다 회전 마찰이 높음 - 구현을 위한 추가회로가 필요함 - 절대 0 도를 세팅해야함 - 데이터라인 (8bit 이상 ) 필요
Modern Control System Lab. Changwon National University 5. Encoder 오토닉스 근래 출시되는 프로세서는 기본적으로 인크리멘 탈형 엔코더 해석기능을 내장하고 있음. (DSP2812, CortexM3 등 ) 전용 해석칩이 존재함 (HCTL 2016 등 )
Modern Control System Lab. Changwon National University 6. DC Motor 제어방법 :PWM DAC
Modern Control System Lab. Changwon National University 7. Control & Monitoring Method 마이크로프로세서 기반 PC 기반
Modern Control System Lab. Changwon National University 7. Control & Monitoring Method 요구 분야대상구현 센서엔코더엔코더해석기능 구동 DC 모터 PWM 혹은 DAC 모니터링 PC 와의 통신 시리얼통신 LABView 제어소숫점연산기능
Modern Control System Lab. Changwon National University 8. Dynamics based Control
Modern Control System Lab. Changwon National University
9. Control without Dynamics Fuzzy controlOn-Off Control
Modern Control System Lab. Changwon National University 10. Controller Design without dynamics
Modern Control System Lab. Changwon National University
function y = fcn(u, dot_u) %#eml mm = -5; m = -3; p = 3; pp = 5; if (u>0) if (dot_u>0) y = mm; elseif (dot_u == 0) y = m; else y = 0; end elseif (u==0) if (dot_u>0) y = m; elseif (dot_u == 0) y = 0; else y = p; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = p; else y = pp; end
Modern Control System Lab. Changwon National University function y = fcn(u, dot_u) %#eml mmm = -10; mm = -5; pp = 5; ppp = 10; if (u>0) if (dot_u>0) y = ppp; elseif (dot_u == 0) y = pp; else y = 0; end elseif (u==0) if (dot_u>0) y = pp; elseif (dot_u == 0) y = 0; else y = mm; end else if (dot_u>0) y = 0; elseif (dot_u == 0) y = mm; else y = mmm; end
Modern Control System Lab. Changwon National University