DC Motor Control
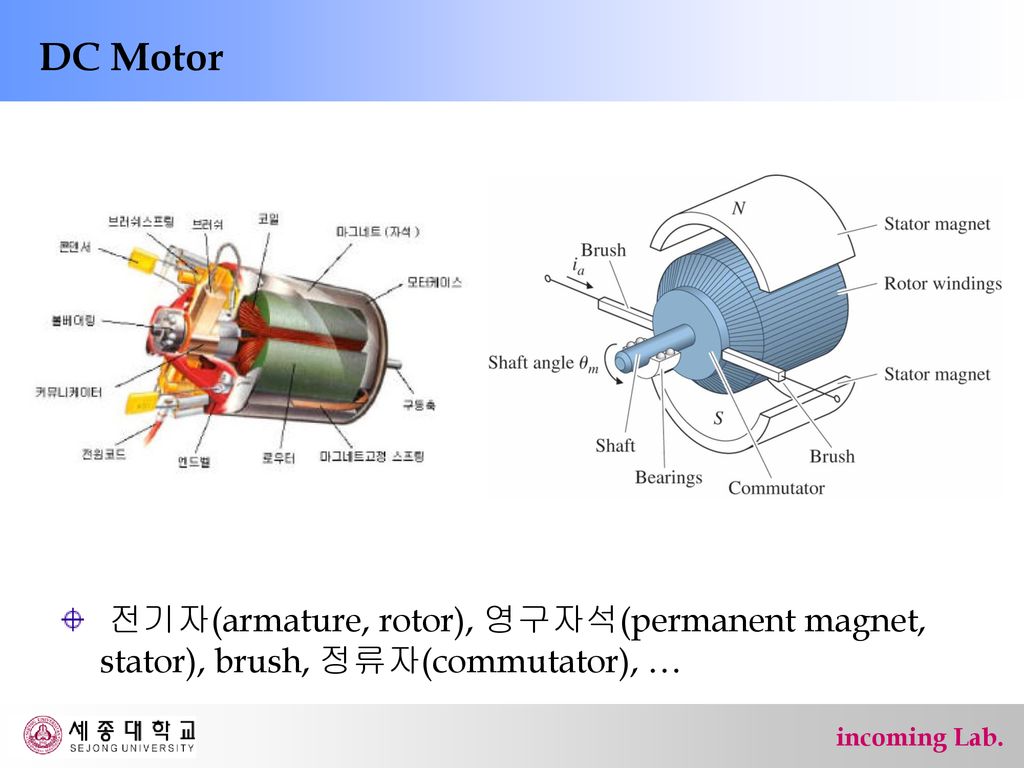
DC Motor 전기자(armature, rotor), 영구자석(permanent magnet, stator), brush, 정류자(commutator), …
Principle of DC Motor Law of Motor : 플레밍의 왼손법칙
Principle of DC Motor Law of Generator : 플레밍의 오른손 법칙
DC Motor
7.4 DC 모터의 제어 – DC motor의 구동 방식 트랜지스터 구동(이미터 부하) : 전압손실이 크다.
7.4 DC 모터의 제어 – DC motor의 구동 방식 트랜지스터 구동(컬렉터 부하) : 전압손실이 적다
7.4 DC 모터의 제어 – DC motor의 구동 방식 H-bridge 제어 회로 : 회전 방향 변경
7.4.3 모터 드라이버 IC L298
7.4.3 모터 드라이버 IC L298의 제어 pin A조 B조 설명 INPUT1,INPUT2 INPUT3,INPUT4 모터의 방향을 결정 OUTPUT1,OUTPUT 2 OUTPUT3,OUTPUT 4 모터의 양단자에 연결 ENABLE A ENABLE B 모터의 On/Off 역할 입력이 High 일때 On,Low일 때 Off Current Sensing A Current Sensing B 0.5옴의 저항을 통해 GND로 연결,정격 전력이 높은저항을 사용해야한다.
7.6 바퀴 구동체
바퀴구동체 도면
I/O 정리 Port B I/O PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0 Port D I/O PD7 PD6 PE7 PE6 PE5 PE4 PE3 PE2 PE1 PE0
Motor Driver & DC motor
DC motor
GPIO를 이용한 DC motor 제어 #include<avr/io.h> int main(void){ DDRB = 0xCF; PORTB = 0xC0; DDRD = 0x00; DDRE = 0x00;
GPIO를 이용한 DC motor 제어 while(1) { if(PIND & 0x01) //Left 스위치 PORTB &= ~0x02; PORTB |= 0x01; } else PORTB &= ~0x01; PORTB |= 0x02;
GPIO를 이용한 DC motor 제어 if(PIND & 0x02) //Right 스위치 { PORTB &= ~0x08; PORTB |= 0x04; } else PORTB &= ~0x04; PORTB |= 0x08; return 0;
실습 과제 Main S/W를 이용하여 motor enable/disable UART 통신을 이용하여 Motor 제어 Key map 정의 예) R : right forward, r : right backward Key 기능당 * 10 점