제 6 장 퍼지시스템 (Fuzzy System) Slide 1 (of 29)
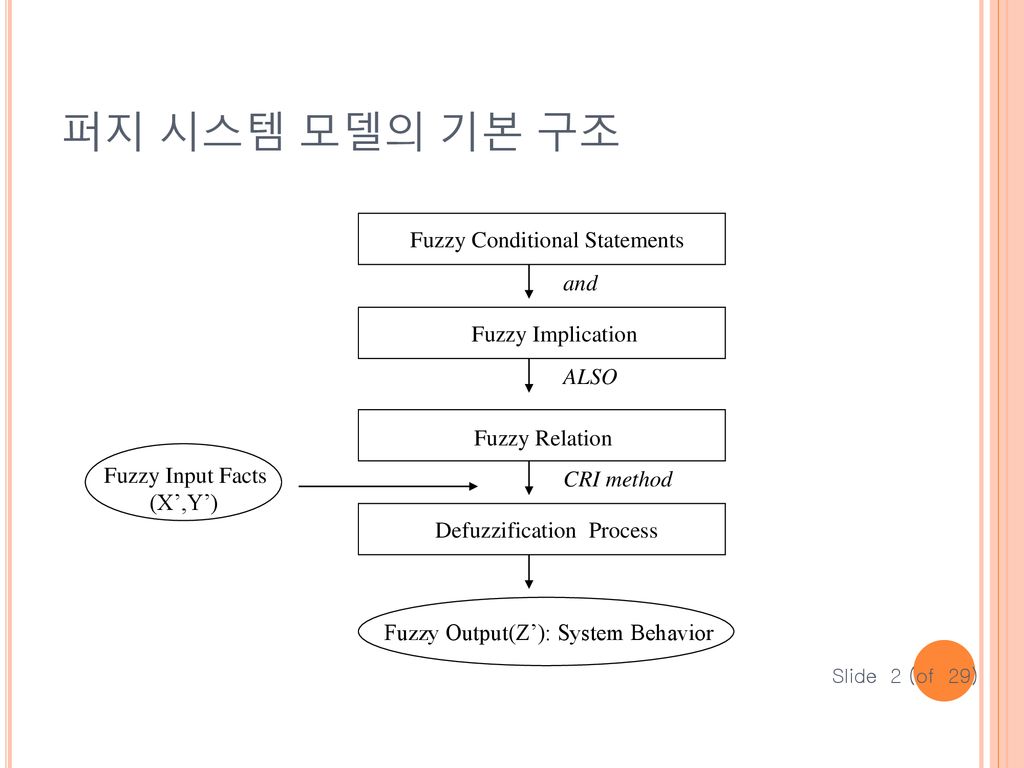
퍼지 시스템 모델의 기본 구조 Fuzzy Conditional Statements and Fuzzy Implication ALSO Fuzzy Relation Fuzzy Input Facts (X’,Y’) CRI method Defuzzification Process Slide 2 (of 29) Fuzzy Output(Z’): System Behavior
퍼지시스템 모델의 규칙표현의 예 입력값: I=Null and Zero ? IF I = Null and Zero then N=Very Large ALSO IF I= Zero and Null then N=Large ALSO IF I= Small and Medium then N=Medium ALSO IF I= Medium and Small then N=Small ALSO IF I= Large and Very Large then N=Zero ALSO IF I= Very Large and Large then N=Zero 규칙의 퍼지관계 전체규칙의 퍼지관계 조건부 결론부 퍼지 조건문(퍼지집합이며 각각 멤버쉽 함수로 표현되어 있음) Slide 3 (of 29) 입력값: I=Null and Zero ? 비퍼지화과정 수행하여 시스템 행동 즉, N에 대한 수치값을 계산한다
퍼지시스템 모델의 단점 1. 멤버쉽 함수들이 주관적으로 결정된다. 즉, 멤버쉽 함수들이 객관적인 개연성을 갖지 못하고 주관적으로 결정된다. 2. 최종적으로 생성된 추론 결과에 오류가 많다. 즉, 오류를 발생시키도록 추론 알고리즘이 작성되어 있다. 3. 추론과정에서 추론 규칙들을 비합리적으로 조합하는 전략을 사 용함으로 오류가 많이 발생한다. 즉, 입력의 조건부와 관계가 없는 규칙들도 추론결과 생성시 많이 관여되는 문제점이 있다. Slide 4 (of 29)
진보된 퍼지시스템 모델 Adaptive Fuzzy System Model(적응적 퍼지시스템 모델) 주어진 목표에 도달할 수 있는가를 고려해 규칙의 특징, 퍼지 집합의 형태, 비퍼지화 방법 등의 변경 수정 등을 수행하는 시스템 모델 Self-Organizing Fuzzy System Model(자기조정 퍼지시스템 모델) 학습 기능과 look-up table 변경 기능이 첨가된 모델 학습과 테이블 변경 기능을 통해 새로운 자극에 대해 적응 제어 등 한정된 영역 Neuro-Fuzzy System Model(뉴로-퍼지시스템 모델) 인간의 사고작용과 같이 학습하고 추론하며 기억하고 인식하는 등의 기능을 하는 보다 지능적인 시스템을 만드는 것을 목표로 하는 시스템 모델 제어 및 다양한 영역에 응용 신경회로망과 퍼지이론의 비교 신경회로망: 학습기능(단점: 학습시간) 퍼지이론: 추론능력(단점: 주관적인 멤버쉽 함수 결정) dj Slide 5 (of 29)
퍼지 시스템 모델 Input Normalization and fuzzification of input variables Execution of rules Output fuzzy set Inference Engine Rules Term set(Vocabulary fuzzy sets) Slide 6 (of 29) Defuzzification of output variables Output
적응적 퍼지 시스템 모델 Input Time-Phased output fuzzy set Normalization and fuzzification of input variables Performance metric Execution of rules Output fuzzy set Inference Engine Rules Adaptation Machine Term set(Vocabulary fuzzy sets) Defuzzification of output variables Slide 7 (of 29) Output
뉴로-퍼지시스템 모델의 개념적 구조도 Human Neural Network N-F Fuzzy Theory <정의> 인간의 사고작용과 같이 학습하고 추론하며 기억하고 인식하는 등의 기능을 하는 보다 지능적인 시스템을 만드는 것을 목표로 하는 시스템 모델 Human Fuzzy or nonfuzzy input facts Neural Network Fuzzy Theory N-F Inference Learning Memory Recognition Calculation Slide 8 (of 29)
패턴인식, 제어, 비전, 의사결정 시스템, 전문가 시스템 등 신경회로망과 퍼지이론의 비교 특성분류기준 신경회로망 퍼지이론 지식표현 가중치값에 의한 분산표현 멤버쉽 함수에 의한 표현 결함내구성 있음 불완전한 자료처리능력 추론 학습함수에 의한 자기조정 능력 반복학습 추론규칙들의 조합에 의한 방법 (CRI) 연산 뉴런들의 다중합 연산 멤버쉽 함수의 Max-Min 연산 기능 특성추출능력 최적화 기능 연상기억기능 다중센서 오토메타 비선형적 매핑 단순계산과정 언어적 또는 수치적 값의 처리 능력 비퍼지화 기능 비선형적 멤버쉽 함수 단점 학습시간 소모 주관적인 멤버쉽 함수 응용영역 패턴인식, 제어, 비전, 의사결정 시스템, 전문가 시스템 등 Slide 9 (of 29)
융합구조에 따른 분류(N-NFS) 신경회로망 중심 형태분류 (1) 비퍼지 뉴로 시스템 모델 (뉴로 시스템 모델) (2) 퍼지 뉴로 시스템 모델 입력값이 퍼지값인 뉴로 시스템 모델 w1 x1 x1 Non- Linearity Function w2 x2 aggregation x2 x y wi weight y xi xi w n-1 x n-1 x n-1 wn x n x n Slide 10 (of 29)
융합구조에 따른 분류(F-NFS) 퍼지이론 중심 형태분류 (1) 비뉴로 퍼지 시스템 모델 (2) 뉴로 퍼지 시스템 모델 CRI (1) 비뉴로 퍼지 시스템 모델 (2) 뉴로 퍼지 시스템 모델 입출력을 학습한 뒤 추론을 행하는 모델 CRI xy, relation learning x y x y Slide 11 (of 29)
융합방식에 따른 뉴로-퍼지 시스템형태 분류 Types Hybrid Types Hybrid Aspects 지식 표현시 멤버쉽 함수 적용 신경회로망 구조에 퍼지이론을 도입한 형태 (N-NFS) 제 1 형태 신경회로망의 출력결과를 퍼지 추론에 이용 신경회로망의 일부기능을 퍼지추론으로 대체 멤버쉽 함수 생성 및 적응적 조절 퍼지 추론 구조에 신경회로망을 도입한 형태 (F-NFS) 규칙획득, 규칙베이스 구성 및 조절 제 2 형태 바람직한 입출력 벡터쌍을 찾음 퍼지 추론 구조를 신경회로망으로 표현 Slide 12 (of 29)
<제1형태: N-NFS> <제2형태: F-NFS> 퍼지 논리 신경회로망 기본적 신경회로망 퍼지 논리 Slide 13 (of 29)
Hybrid Aspects ② ③ ① I/O vector Rule Base Membership Function <제 1 형태> < 제 2 형태> Slide 14 (of 29)
진보된 퍼지 시스템 모델간의 유사점 vs. 차이점 특성모델 분류 유사점 차이점 적응적 퍼지 시스템 모델 •퍼지 시스템 모델의 정형화된 문제점을 동적으로 개선하려 한 점 • 퍼지 시스템 모델에서 사용하는 Max-Min CRI 방법의 세가지 문제점을 모두 해결해주지 못한 점 •외부환경 변화에 적응하기 위해 퍼지 규칙이나 멤버쉽 함수 또는 비퍼지화된 방법 등을 변경함으로서 적응 • 주로 제어시스템 분야에 응용 자기조정 퍼지시스템 모델 • 학습기능 및 참조테이블 변경 방법을 통해 새로운 자극에 대해서도 끊임없는 적응가능 • 진정한 의미의 적응적 퍼지 시스템 모델 뉴로-퍼지 시스템 모델 • 신경회로망과 퍼지이론의 장점만을 융합한 진정한 의미의 자기조정 퍼지시스템 모델 • 다양한 융합형태, 학습알고리즘 및 응용영역을 가짐 Slide 15 (of 29)
퍼지추론의 유형 추론 결과도 행렬형태로 표시된다. 퍼지 멤버쉽 함수형태로 표시된다. 퍼지 관계를 행렬형태로 표현하는 경우 추론 결과도 행렬형태로 표시된다. 퍼지 멤버쉽 함수형태로 표시된다. 멤버쉽 함수가 이산적(discrete)일 때 유용한 표현 입출력 관계를 행렬식으로 정확히 할 경우 편리한 방법이다. 퍼지 관계를 규칙에 의해 표현하여 규칙베이스를 형성할 경우 추론 결과가 비퍼지 형태의 숫자값을 가질 수 있다. 이러한 방법이 제어분야에서 더 일반적이다. 멤버쉽 함수가 그래프로 연속적으로(continuous) 표현될 때 유용한 표현 일반 에어컨, 전자제품, 기타 산업용 제어시스템에서 응용된다. Slide 16 (of 29)
Conditions -> Concl. Code 퍼지 규칙 베이스 (Fuzzy RuleBase) 구조 다양화 Fuzzy이론에서는 지식을 “If Condition(조건) Then Conclusion(결론)” 의 형식을 가진 일련의 규칙(Rule)들의 트리 형태 로 구성 1: Root 세분화 2: a -> Concl.2 3: b -> Concl.3 4: c -> Concl.4 5: d -> Concl.5 6: e -> Concl.6 7: f -> Concl.7 9: g -> Concl.9 Rule 내용 8: g -> Concl.8 Rule No : Conditions -> Concl. Code Case 2 a Case 3 b Case 4 c Case 5 a,d Case 6 a,e Case 7 c,f Case 8 c,f,g Case 9 c,g Slide 17 (of 29)
퍼지추론(Fuzzy Inference) Condition Part Conclusion Part Rule Type #1: IF (Ca/Na and Mg/Na Ratio is too high) and…..and (Ca/P Ratio is too low) THEN Metabolic Type #3 IF Metabolic Type #3 and Account Number is 007 and…. THEN Description Type #7 Condition Part Conclusion Part µ µ µ µ High Medium Low Type #3 …... Ca/Na Mg/Na Ca/P ….. ….. ….. µ µ µ µ Medium Low High Type #4 Slide 18 (of 29) Ca/Na Mg/Na Ca/P
Decision by Center Of Area(COA) Method 비퍼지화 방법: 무게 중심법 Decision by Center Of Area(COA) Method Input Facts: Ca/Na is 4.55 and Mg/Na is 15.7 and … Ca/P is 12.3 Conclusion Part µ …... µ: Membership Function Answer : COA µlow(A) : A가 low에 속할 Membership Degree --> [0,1] (예) µlow(12.5) = 0.8 Slide 19 (of 29)
Fuzzy Controller 구조 의사결정논리 지식 베이스 (DB+Fuzzy 제어규칙베이스) 퍼지화 인터페이스 비퍼지화 입력변수들의 값을 대응되는 전체집합으로 전환하는 기능 출력변수들의 값을 대응되는 전체집합으로 전환하는 기능 지식 베이스 (DB+Fuzzy 제어규칙베이스) 퍼지화 인터페이스 비퍼지화 인터페이스 입력자료를 적당한 언어변수값으로 전환하는 퍼지화 기능 의사결정논리 (인간의 의사결정논리와 비슷) 추론결과로 부터 비퍼지 제어행동을 유도하는 기능 퍼지 퍼지 Slide 20 (of 29) 프로세스 출력 또는 상태 제어시스템(프로세스) 실제제어 비퍼지
직류계열 모터(DC Series Motor) + - UN Regulation-duty Register Rr N Series Excitation M I Compensating Winding Slide 21 (of 29) (I: 모터 현재값 N: 분당회전속도 UN: 제공된 볼트 M: Motor)
직류계열 모터의 퍼지 규칙베이스 IF I = Null then N=Very Large ALSO IF I= Zero then N=Large ALSO IF I= Small then N=Medium ALSO IF I= Medium then N=Small ALSO IF I= Large then N=Zero ALSO IF I= Very Large then N=Zero 각 퍼지집합(Null, Zero, Medium….)에 대한 데이타베이스는 표 6.4(p.311)를 참조할 것 조건부 결론부 Slide 22 (of 29)
조건부 결론부 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #1 규칙 #2 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #3 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #4 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #5 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 Slide 23 (of 29) 규칙 #6 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000
조건부 (전류) 결론부 (회전속도) 입력 = Null (빨긴부분) 일 경우 규칙 #1 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #2 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #3 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #4 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #5 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 Slide 24 (of 29) 규칙 #6 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000
전류에 대한 입력이 Null일 경우 회전속도는 1390이 된다. 즉, 퍼지 입력값에 대하여 비퍼지 결과값이 산출되었다. 규칙 #1 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 규칙 #2 0 1 2 3 4 5 6 7 8 9 10 400 600 800 1000 1200 1400 1600 1800 2000 <무게중심 구하는 방법> 옆 그림의 5개의 점을 이용한다. 0*1200 + 0.5*1400 + 0.5*1600 + 0.5 *1800 + 1*2000 0+0.5+0.5+0.5+1 = 1390 Slide 25 (of 29) 무게중심 전류에 대한 입력이 Null일 경우 회전속도는 1390이 된다. 즉, 퍼지 입력값에 대하여 비퍼지 결과값이 산출되었다.
운전자의 조작을 모델링하여 퍼지 제어기를 실현 운전자의 조작을 모델링하여 퍼지 제어기를 실현 운전 기교 모델링 Sugeno Crank-shaped course에서의 주행궤적 Slide 26 (of 29)
입출력 변수와 데이터 입력변수: x1 = 코너 입구로부터의 거리 x2 = 안쪽벽으로부터의 거리 x3 = 모델차의 방향(각도) 출력변수: y = 운전자의 출력으로 steering handle 의 각도 x1 x2 x3 x4 Slide 27 (of 29)
Slide 28 (of 29)
Slide 29 (of 29)