Robot System 다양한 작업을 수행할 수 있도록 프로그램된 가변동작을 통해 자재, 부품, 공구 등을 운반하도록 설계된 재프로그램이 가능한 다기능 조종장치 로봇 도입 효과 . 제품의 흐름이나 생산시간의 예측이 정확 . 설비의 범용성, 유연성 향상 . 위험한 작업으로의 해방 로봇의 구조 . Joint : 관절 . Link : 조인트에 연결된 구성품 . End-efector : 특정한 작업을 수행할 수 있도록 부착 된 장치 (공구, 그리퍼 등)
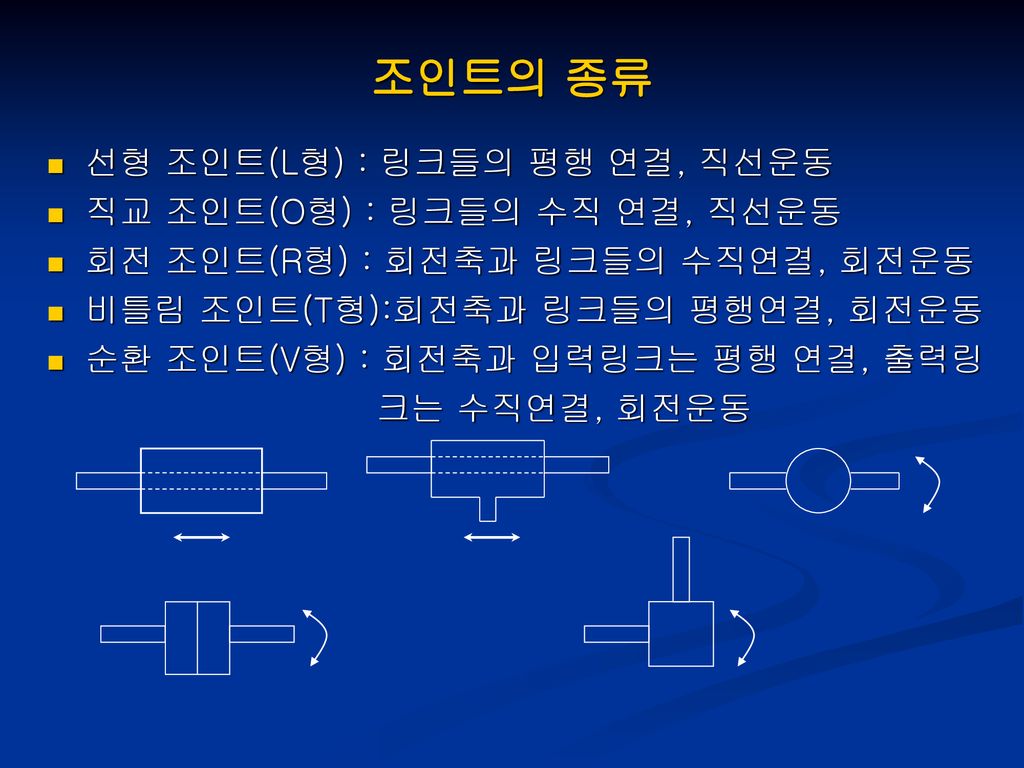
조인트의 종류 선형 조인트(L형) : 링크들의 평행 연결, 직선운동 직교 조인트(O형) : 링크들의 수직 연결, 직선운동 회전 조인트(R형) : 회전축과 링크들의 수직연결, 회전운동 비틀림 조인트(T형):회전축과 링크들의 평행연결, 회전운동 순환 조인트(V형) : 회전축과 입력링크는 평행 연결, 출력링 크는 수직연결, 회전운동
로봇의 형태 직각좌표형 : LOO형, OLO형, 정밀 작업 극좌표형 : TRL형, 넓은 작업영역, 용접, 도장 등 원통좌표형 : TLO형, 넓은 작업영역, 위치결정도가 높음 다관절형 : TRR형, 높은 유연성, 복잡한 작업 SCARA형 : VRO형, 삽입형 조립작업
로봇의 제어 Sequence Control : 미리 설정된 순서와 조건 및 위치에 따라 동작의 각 단계를 차례로 진행 Play Back Control : 작업의 순서, 위치, 기타 정보 등을 기억시키고, 재생하여 작업을 수행 Numerical Control : 수치화된 순서, 위치 및 기타 정보에 의해 작업을 수행 지능형 로봇 : 의사결정, 연산기능, 등을 포함, 감각기능과 인식기능에 의해 행동을 결정
로봇 프로그래밍 Lead through 프로그래밍 운영자가 로봇팔을 원하는 경로대로 움직이고 이 프로그램을 메모리에 입력 컴퓨터형 프로그래밍 VALII, AML, RAIL, HELP등 Off-line 프로그래밍 Simulation : PLACE, ROBOCAM, Robot-SIM 등
로봇의 성능 제어 분해능 공간 분해능 . 제어 분해능, 조인트 링크 사이의 기계적 측면을 고려 정확도 . 조인트의 범위를 분할할 수 있는 능력 . 번지점 : 로봇에게 동작 명령을 내릴 수 있는 위치 . 번지점의 수 : 2n n : 조인트에 할당된 비트 수 . CR = 조인트의 범위/ 2n 공간 분해능 . 제어 분해능, 조인트 링크 사이의 기계적 측면을 고려 . SR = CR + 6σ σ : 기계적 오차의 표준편차 정확도 . 로봇관절의 끝을 원하는 위치에 도달하게 하는 능력 . 정확도 = CR/2 + 3σ 반복성 . 기존 위치에 관절의 끝을 다시 도달하게 하는 능력 . 반복성 = 3σ
로봇의 감지기 내부 감지기 조인트의 위치와 속력을 제어 외부 감지기 로봇의 작업과 다른 장비들과의 조화 . 촉각 감지기 . 근접 감지기 . 머신비젼과 광 감지기(부품식별, 다른 물체의 존재, 근접정도 등) . 기타 감지기 (온도, 유압, 전압, 전류, 진동 등)
로봇의 성능 향상 지능화 동작의 고속화 및 다양화 운반 가능 중량의 증대와 소형화 로봇구조의 모듈화 감각, 인식, 판단능력의 부여 동작의 고속화 및 다양화 작업시간 단축, 고정밀, 복잡한 작업의 적용 운반 가능 중량의 증대와 소형화 로봇구조의 모듈화 다양한 작업에 유연하고 신속하게 대처
http://channel. pandora. tv/channel/video. ptv http://channel.pandora.tv/channel/video.ptv?ch_userid=sjk5675&prgid=34364120 http://channel.pandora.tv/channel/video.ptv?ch_userid=sjk5675&prgid=34364132 http://channel.pandora.tv/channel/video.ptv?ch_userid=sjk5675&prgid=34363614