4. Matlab-Simulink를 이용한 메카니즘 해석 Korea University of Technology and Education School of Mechatronics
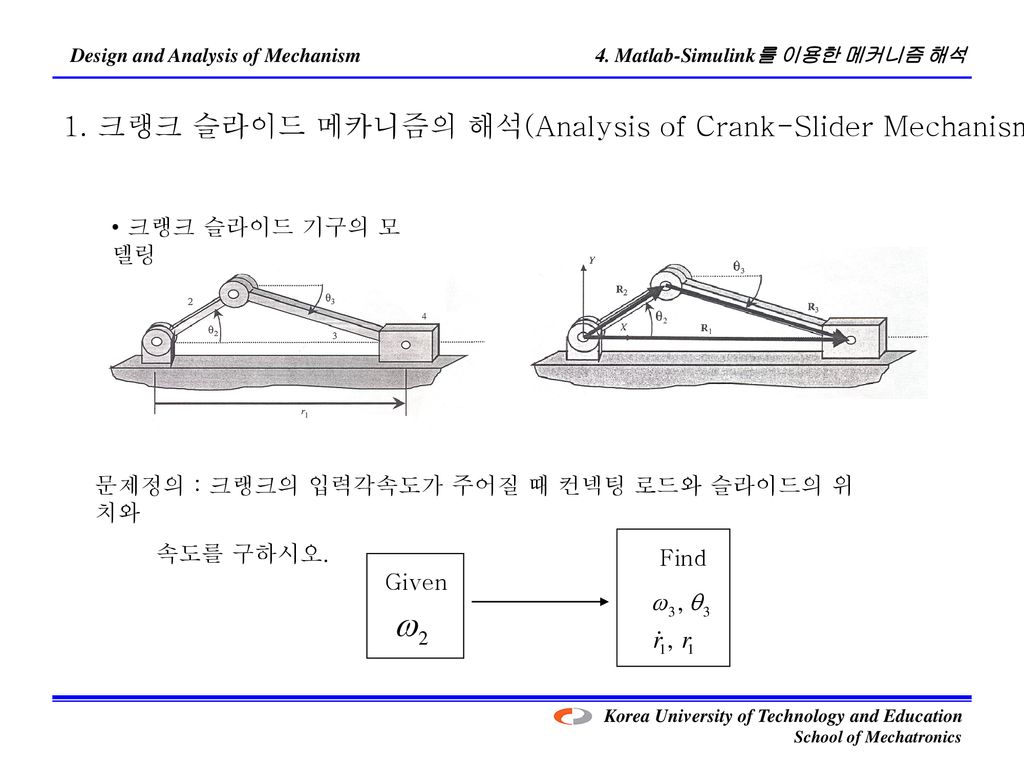
1. 크랭크 슬라이드 메카니즘의 해석(Analysis of Crank-Slider Mechanism) 크랭크 슬라이드 기구의 모델링 문제정의 : 크랭크의 입력각속도가 주어질 때 컨넥팅 로드와 슬라이드의 위치와 속도를 구하시오. Find Given Korea University of Technology and Education School of Mechatronics
기구학적 해석을 위한 크랭크 슬라이드의 백터방정식 Vector Loop Equation : x-component : (1) y-component : (1)식은 크랭크 슬라이드 기구의 위치에 관한 백터방정식이다. 위의 식을 시간에 대하여 미분하면 크랭크 슬라이드 기구의 속도에 관한 백터방정식을 다음식(2)와 같이 얻을 수 있다. (2) (2)식을 행렬형태로 정리하면 다음식(3)과 같이 표현할 수 있다. (3) Korea University of Technology and Education School of Mechatronics
(3)식을 풀면 커넥팅로드와 슬라이드의 속도를 구할 수 있다. (4) Given Find function [x]=compvel(u) % % u(1)=omega-2 % u(2)=theta-2 % u(3)=theta-3 r2=1.0; r3=4.0; a=[r3*sin(u(3)) 1 ; -r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2)) ; r2*u(1)*cos(u(2))]; x=inv(a)*b Korea University of Technology and Education School of Mechatronics
Simulink 를 이용한 크랭크 슬라이드의 기구학적 해석 문제 : 크랭크의 입력각속도가 주어질 때 컨넥팅 로드와 슬라이드의 위치와 속도를 구하시오. Initial condition : Crank velocity : input Output 1 Output 2 Korea University of Technology and Education School of Mechatronics
Simulink Model File for the Crank Slider Mechanism Analysis Korea University of Technology and Education School of Mechatronics
Simulink 실행하기 File New Model View Simulunk Library Browser Workspace for programming View Simulunk Library Browser Library Browser Korea University of Technology and Education School of Mechatronics
Simulink Library Clock Constant - Display and provide the simulation time. - The Clock block outputs the current simulation time at each simulation step. Constant - generate a constant value. - The constant block generate a real or comples constant value. Korea University of Technology and Education School of Mechatronics
Integrator - The Integrator block outputs the integral of its input at the current time step. - The following equation represents the output of the block y as a function of its input u and an initial condition y0, where y and u are vector functions of the current simulation time t. Korea University of Technology and Education School of Mechatronics
MATLAB Fcn To Workspace - The MATLAB Fcn block applies the specified MATLAB function or expression to the input. - The output of the function must match the output dimensions of the block or an error occurs. To Workspace - The To Workspace block writes its input to the workspace - The block writes its output to an array or structure that has the name specified by the block’s Variable name parameter. Korea University of Technology and Education School of Mechatronics
Mux Demux - The Mux block combines its input a single output. - An input can be a scalar, vector, or matrix signal. Demux - The Demux block extracts the components of an input signal and outputs the components as separate signals. Korea University of Technology and Education School of Mechatronics
double click constant : double click Initial value : Korea University of Technology and Education School of Mechatronics
double click number of input double click number of input double click of output Korea University of Technology and Education School of Mechatronics
Output variable name double click Output variable type Korea University of Technology and Education School of Mechatronics
double click m-file name Korea University of Technology and Education function [x]=compvel(u) % % u(1)=omega-2 % u(2)=theta-2 % u(3)=theta-3 r2=1.0; r3=4.0; a=[r2*sin(u(3)) 1 ; -r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2)) ; r2*u(1)*cos(u(2))]; x=inv(a)*b Korea University of Technology and Education School of Mechatronics
Simulink simulation 실행하기 double click Configuration parameter 실행시간 설정 start Output file 생성 변수명 : simout Korea University of Technology and Education School of Mechatronics
Output file 생성 변수명 : simout time : simout(:,1) : simout(:,2) : simout(:,3) : simout(:,4) : simout(:,5) : simout(:,6) time Korea University of Technology and Education School of Mechatronics
Plot of the Distance of the Slider Plot of the velocity of the Slider Korea University of Technology and Education School of Mechatronics
2. 4절링크 메카니즘의 해석(Analysis of 4-bar Mechanism) 4절링크 기구의 모델링 문제정의 : 입력링크의 각속도가 주어질 때 컨넥팅 로드와 출력링크의 위치와 속도를 구하시오. Find Given Korea University of Technology and Education School of Mechatronics
기구학적 해석을 위한 4절링크의 백터방정식 Vector Loop Equation for Position: 위의 방정식을 x, y 성분으로 분해하면 다음과 같은 방정식을 얻을 수 있다. Korea University of Technology and Education School of Mechatronics
위의 방정식을 미분하면 4절 링크에 대한 속도 백터방정식을 얻을 수 있다. 위의 방정식을 미분하면 4절 링크에 대한 속도 백터방정식을 얻을 수 있다. 위치방정식 (1) 속도방정식 (2) (2)식을 풀면 커넥팅로드와 출력링크의 속도를 구할 수 있다. (3) Korea University of Technology and Education School of Mechatronics
Simulink 를 이용한 4절 링크기구의 기구학적 해석 문제 : 입력링크의 각속도가 주어질 때 컨넥팅 로드와 출력링크의 위치와 속도를 구하시오. Initial condition : Crank velocity : input Output 1 Output 2 Korea University of Technology and Education School of Mechatronics