컴퓨터 시뮬레이션 기반 메카트로닉스 시스템 설계 Lesson 2 컴퓨터 시뮬레이션 기반 메카트로닉스 시스템 설계 시뮬레이션 기반의 설계동향 3축 로봇 개념을 이용한 해상용 위성안테나의 시뮬레이션 기반 설계예
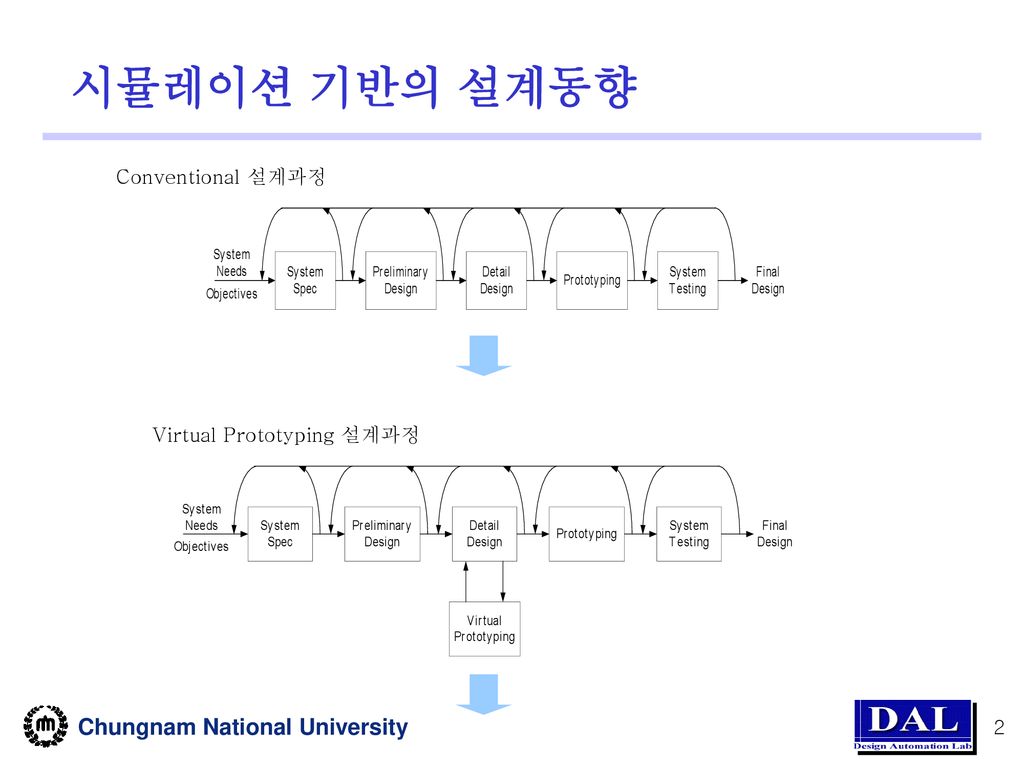
Virtual Prototyping 설계과정 시뮬레이션 기반의 설계동향 Conventional 설계과정 Virtual Prototyping 설계과정
HILS를 포함한 메카트로닉스 시스템의 설계과정 시뮬레이션 기반의 설계동향 HILS를 포함한 메카트로닉스 시스템의 설계과정 조향 HILS 시스템 예
해상용 위성안테나의 시뮬레이션 기반 설계예 해상용 위성 안테나 경사계, 각속도 센서, GPS 센서와 송수신 장치, 구동 모터, 모션 제어 장치로 구성된 3축 로봇 시스템 선박 대 선박의 충돌 예방, 항로 네비게이션, 정보 수신, 양방향 통신을 목적으로 사용 본 논문에서 개발하고자 하는 해상용 위성 안테나는 왼쪽의 그림에서 보시는 바와 같이 위성을 지향하기 위한 센서부, 송수신 장치, 구동 모터, 모션 제어 장치로 구성된 3축 로봇 시스템입니다. 오른쪽의 그림에서 보시는 바와 같이 항해 중인 선박은 파도 및 파랑 등의 영향에 의하여 6자유도 운동을 하게 됩니다. 해상용 위성 안테나는 이러한 외란에서도 항상 안정하게 위성을 지향 할 수 있는 시스템 유지하여 위성 안테나와 송수신 하면서 선박대 선박의 충돌 예방, 항로 네비게이션, 정보 수신, 양방향 통신을 목적으로 사용되고 있습니다.
가상시제품 시뮬레이션 기반 설계의 필요성 시제품 제작을 통한 안테나 성능 테스트 문제점 : 많은 시간과 비용 소요, 해상 실험의 위험성 내재 해결 방안 : 비용의 절감과 설계 품질 향상을 위해 가상 시제품 (Virtual Prototyping)을 적용한 시뮬레이션 기반 설계 방안 도입 3D CAD 형상 모델링 동역학 및 기구학 해석 동역학 및 제어 시뮬레이션 해상용 위성안테나의 가상 시제품 설계의 필요사항 안정화된 제어 성능을 유지하기 위한 해상용 위성 안테나의 개발에 필수 과정인 시제품을 통한 안테나 성능 테스트는 다음과 같은 문제점을 가지고 있습니다. 우선 많은 시간과 비용이 소요되며, 성능 테스트가 실제 선박에서 이루어지는 것이기 때문에 때로는 위험하기까지 합니다. 그러므로 가상 시제품을 적용한 시뮬레이션 기반 설계 방안의 도입은 해상용 위성 안테나를 개발하는데 매우 유용하다고 할 수 있습니다. 따라서 본 논문의 연구 목적은 해상용 위성 안테나 개발 과정에 필요한 이상적인 설계 과정을 다음의 사항들을 통하여 정립하는 것을 목표로 하고 있습니다.
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 이 그림은 시뮬레이션 기반 위성 안테나의 설계 프로세스입니다. 기존의 설계 프로세스에 가상 시제품을 통한 해석 및 시뮬레이션 과정을 추가하여 설계의 타당성 검증하는 이 과정은 설계 및 제작 시간의 단축, 비용 절감 등의 효과를 얻을 수 있습니다. 지금부터 각 과정에 대한 세부 사항들을 차례로 설명해 드리도록 하겠습니다. 먼저 설계 요구 조건입니다.
설계 요구 조건 Marine satellite antenna specifications Subsystem Parameter items Required spec Mechanism Dish diameters 1 ~ 1.2 m Weight Less than 100Kg Materials Al2024 Yaw, Roll, Pitch gear ratio 10:1 Controller accuracy Pointing Accuracy 0.2° Max Ship Motion Roll ±25° / 6~12 sec periods Pitch ±15° / 6~12 sec periods Yaw ±8° / 15~20 sec periods Range AZ ±360 deg EL -10 to 100 deg XL ±30 deg Max angular vel. Yaw, Pitch, Roll 18 deg/sec angular accel. 18 deg/sec^2 보시는 표는 해상용 안테나의 설계 요구 조건 입니다. 요구조건 시 가장 중요시 되는 점은 0.2도의 제어 정밀도와 선박이 가지는 외란 범위, 그리고 안테나가 구동되는 모션 레인지 입니다. 첫번째 동영상은 에즈머스 범위를 나타내며 두번째 동영상은 엘레베이션을 세번째는 크로스레벨의 모션 레인지를 나타내고 있습니다. Marine satellite antenna specifications
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 이제 설계 요구 사항에 따른 3D CAD 형상 모델링 그리고 간섭 확인 및 매스 발란싱에 대해 말씀 드리겠습니다. Design procedure of antenna
3D CAD 형상 모델링 안테나를 구동하는 3축이 한 점에서 만나도록 설계 설계 및 제작상의 수정과 유지 보수를 위한 모듈화 설계 안테나의 운동에 영향을 주지 않도록 하기 위한 기구 안에 선처리 안테나의 형상 모델링에 대한 기구 설계의 요구조건은 다음과 같습니다 . 첫째, 특별한 트렌스포메이션이 필요 없도록 안테나를 구동하는 3축이 한 점에 만나도록 설계 하였습니다. 둘째, 설계 및 제작상에 일어나는 설계 수정 과 유지 보수가 용이하도록 모듈화 설계 방식을 택하였습니다. 세번째로 안테나의 운동에 영향을 주지 않도록 기구 안에 선 처리를 할 수 있도록 설계하였습니다. 이러한 형상 모델링이 완성되면 안테나 각 축 모션 범위에 따른 구조적인 간섭을 확인 합니다. 이번 연구에서는 Pro-E의 Pro/mechanism 기능을 이용하여 간섭을 확인하고 그 간섭을 회피하는 구조를 재설계 하였습니다. 간섭확인을 마치고 난 뒤에 각 축 모터에 대한 불필요한 부하를 제거하여 원활한 제어를 할 수 있도록 안테나 날개 양 끝단에 카운트 매스를 설치하여 매스 발란싱 작업을 수행합니다.
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 다음으로 모터 선정에 관하여 관성 모멘트를 측정한 모터 선정에 관하여 말씀드리도록 하겠습니다. Design procedure of antenna
모터 선정 Measured moment of inertia and torque Yaw_I( ) Yaw_Torque( ) 0 deg 4.87 1.529 90 deg 4.28 1.344 Pitch_I( ) Pitch_Torque( ) 0/90 deg 2.64 0.828 Roll_I( ) Roll_Torque( ) 3.12 1.008 4.38 1.969 안테나 요구 조건 중 각 축 별 최대 각가속도를 알고 각 조인트에 대한 관성 모멘트를 측정하여 예상되는 반력 토크를 계산해내면, 이는 적절한 모터를 선정하기 위한 기준이 됩니다. 설계 요구조건에 따라 안테나 각 축의 최대 각 가속도는 18deg/sec제곱 즉 0.314라디안 퍼 세크제곱으로 설정하였고, 안테나 모델의 관성 모멘트는 Pro-E에서 제공하는 관성 모멘트 해석 방법을 적용하여 안테나가 운동하는 각 자세별로 측정하였습니다. 가장 큰 토크를 내는 자세는 0deg 일때 나타나는 것을 알 수 있으며 이를 기준으로 타이밍 벨트의 감속비와 안전율을 고려하여 최대 토크 0.382뉴턴 미터를 가지는 모터를 선정하였습니다. maximum motor torque Moment of inertia computation using CAD 안전율 타이밍 벨트 감속비
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 다음으로 정적인 관성 모멘트만의 모터 선정의 타당성 검증을 위하여 동역학 해석 프로그램인 아담스로 모델을 생성한 뒤 역동역학 시뮬레이션을 한 과정에 대해 말씀 드리도록 하겠습니다. Design procedure of antenna
Recommended ship motion by INMASAT 역동역학 해석 Axis Angle (rad) Angular vel. (rad/s) Yaw Roll Pitch Recommended ship motion by INMASAT Case2의 최대 토크가 case1에 비해 5배 높게 측정 최대 토크의 범위가 정적으로 선정한 모터 만족 일반적인 CAD 모델을 IGES 파일로 생성한 뒤 CAE 프로그램에 맞는 모델로 변환하는 과정은 형상만이 남게 되며 CAD 모델을 생성했을 때의 물성치 및 관성 모멘트 값이 상실되게 됩니다. 따라서 프로이에서 설정한 모든 값을 그대로 동역학 해석 프로그램인 아담스에 적용시키기 위해 아담스 메크프로라는 모듈을 이용하여 프로이 모델을 아담스 모델로 변환하였습니다. 그 다음으로 초기 설계 요구조건에 따라 각 축 별 속도를 인가하여 나타나는 토크값을 확인 하였습니다. 첫번째 케이스는 다른 축들을 고정하고 1자유도 모델을 만들어 각속도를 인가하였을 때 나타난 토크값을 측정하는 것입니다. 두번째 케이스는 그라운드 바디만 묶어둔 채 3축 동시에 각속도를 인가하여 나타난 토크값을 측정하는 것입니다. 이 그래프는 각 케이스에 대한 그에 대한 그래프입니다. 두번째 그래프를 보시면 각 구동축을 동시에 작동시켰을 때 서로 연성 효과가 발생하여 한 축 구동에 비해 최대 토크가 5배 크게 나타 남을 확인 할 수 있습니다. 하지만 최대 토크가 0.1뉴턴 미터 의 범위 안에 있어 관성 모멘트를 이용하여 선정한 모터가 이를 만족함을 알 수 있습니다.
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 다음으로 동역학 및 제어 시뮬레이션에 적용하기 위한 아담스 모델을 생성에 대해 설명하도록 하겠습니다. Design procedure of antenna
동역학 시뮬레이션을 위한 ADAMS 모델 생성 Motor Rotor Body에 추가 Timing belt 기구적 구속 Sensor Markers Actual sensor Sensing Object Two Tilt Level and Cross-level Tilt Angle Three Gyro Level, Cross-level Tilt Velocity and Yaw angular velocity Compass Yaw Angle 동역학 시뮬레이션을 위해 기구적인 모터는 아담스 안테나 모델에 로터 바디를 추가하여 관성 효과를 인가하였고, 구동 축과 모터와 연결하는 타이밍 벨트는 10대 1의 기어비를 갖는 기구적 구속으로 설정하였습니다. 위성지향 제어를 위한 각도 및 각속도 정보는 센서케이지에 좌표를 만들어 측정하는 것으로 설정하였습니다. 좌표의 변화로 측정되는 각도 및 각속도 정보는 다음 센서 모델에 입력으로 들어가 실제적인 센서 측정값으로 변경됩니다. 자세제어를 위한 지령은 센서 케이지를 구동시키는 스텝모터로 전달하게 됩니다. 선박의 6자유도 외란을 인가하기 위해 안테나 기저부에 아담스에서 제너럴 포인트 모션 타입으로 설정하였습니다. 외란 6자유도 모션 인가
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 다음으로 동역학 및 제어 시뮬레이션에 적용하기 위한 아담스 모델을 생성에 대해 설명하도록 하겠습니다. Design procedure of antenna
모터 및 센서 모델링 Motor modeling Sensor modeling ADAMS 플랜트에 입력해 줄 토크를 계산하기 위한 모터 동역학 모델은 다음과 같은 수식으로 정의 된다. 여기서 제이값은 아담스 모델에서 측정되는 이너시아 값이며 토크상수 저항 및 인덕턴스 값들은 최대 기동 토크 3.9Kgf-cm을 가진 모터 spec을 따라 상수로 정의됩니다. 아담스에서 마커를 통해 측정된 각도 및 각속도 정도는 매우 이상적인 값이기 때문에 시뮬레이션에 현실성을 부가 하기 위해 실제 안테나 시스템에 적용되는 경사계 및 자이로 센서 를 추가적으로 만들어 주어야 한다. 이를 위해 왼쪽 그림에서 보시는 바와 같은 실험 장치를 만들어 경사계의 횡가속도 영향과 같은 주파수 특성을 분석하여 수학적으로 센서를 모델링 하였다. 경사계의 횡 가속도 영향 센서의 주파수 특성을 실험을 통하여 분석하여 수학적으로 모델링
센서 신호처리 알고리즘 Sensor fusion algorithm block diagram 경사계의 횡 가속도 영향, 각속도 센서의 드리프트 현상, 센서의 제한된 응답성을 해결하기 위한 신호처리 알고리즘 적용 경사계의 저주파 성분과 각속도 센서의 고주파 성분을 융합하여 적용 센서를 통과한 각도 및 각속도 정보는 경사계의 횡가속도 영향, 각속도 센서의 드리프트 현상, 센서의 제한된 응답성, 센서 노이즈등을 가지고 있습니다. 이를 제거하고 PIDA 제어기에 들어가는 보다 정확한 각도, 각속도, 각가속도 값을 추정하기 위하여 그림과 같은 센서 신호처리 알고리즘을 적용 시킵니다. 자세한 사항은 공동 연구하는 프로젝트가 특허에 한정되어 있어 말씀드릴 수 없지만 경사계가 가지는 저주파 성분과 각속도 센서의 고주파 성분을 서로 융합하여 적용시키는 원리 입니다.
PIDA 제어 알고리즘 PID 제어기에 가속도 성분을 추가하여 제어 시스템의 안정성 향상 PIDA controller block diagram PID 제어기에 가속도 성분을 추가하여 제어 시스템의 안정성 향상 0.2° 제어 정밀도, 센서 신호 처리 문제, 자세 안정화 제어 및 위성 지향 제어가 3축이 동시에 이루어지는 제어 방해 요인을 감안하여 안테나 시스템에 안정성 높은 PIDA제어기 적용 해상용 위성 안테나에 적용되는 제어기는 PIDA 제어기로써 PID제어기에 가속도 성분을 추가하여 제어 시스템의 안정성을 향상시키는 제어기 입니다. 0.2° 제어 정밀도, 센서 신호 처리 문제, 자세 안정화 제어 및 위성 지향 제어가 3축이 동시에 이루어지는 제어 방해 요인을 감안하여 안테나 시스템에 안정성 높은 PIDA제어기 적용하였습니다.
Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계 과정 Design procedure of antenna 시뮬레이션 기반 위성 안테나 설계의 마지막 과정으로 아담스 매틀랩 코시뮬레이션을 이용한 선박 운동에 대한 동역학 및 제어 시뮬레이션에 대해 말씀드리도록 하겠습니다. Design procedure of antenna
IMU(Inertial Measurement Unit) 데이터 취득 오른쪽의 그래프는 안테나 제어에 직접적으로 영향을 주는 히브, 롤, 피치, 요 값을 표시한 것입니다. 이 실선의 6자유도 데이터를 아담스의 6자유도 모션 기능에 스플라인 데이터 형태로 인가하여 외란을 모사하였습니다.
안테나 동역학 및 제어 시뮬레이션 안테나 3축 제어 알고리즘(Matlab/Simulink) 안테나 제어는 그림과 같이 구동을 위한 3개의 토크 입력을 받고 각 축 별 각도, 각속도, 각가속도 측정값으로 총 9개의 출력을 내보낸다. 시뮬레이션 조건으로 위성 지향을 위해서 위성 지향각(방위각: 45°, 고각: 45°)을 입력하였고, 동시에 안테나 기저부에는 IMU를 이용한 실선 6 자유도 데이터(roll, pitch, yaw, surge, sway, heave)를 주어 실제 선박 모션을 모사 하였다. 안테나 3축 제어 알고리즘(Matlab/Simulink)
안테나 동역학 및 제어 시뮬레이션 3 axes control simulation result 보시는 동영상은 안테나 기저부에 6자유도 모션이 인가될 때 방위각 45도 고각 45도를 유지하는 아담스 매틀랩 코시뮬레이션 결과 동영상 입니다. 그래프는 외란이 인가 됐을 때 나타난 PID, PIDA 제어기를 비교한 시뮬레이션 결과입니다. PID제어기의 응답을 보면 roll축과 pitch축이 6자유도 외란에 의해 3초 되는 지점부터 시작하여 약 0.1° 진폭의 작은 진동이 생기는 문제점을 확인 할 수 있습니다. 선박의 모션이 보다 극심할 경우 PID제어기의 진동 문제는 더욱 커질 것으로 사료 됩니다.
해상용 위성안테나의 시뮬레이션 기반 설계 과정 정립 및 추후 과제 해상용 위성안테나의 시뮬레이션 기반 설계 과정 정립 및 추후 과제 해상용 위성 안테나의 시뮬레이션 기반 설계 프로세스 정립 추후 과제 위성 안테나에 대한 정교한 3차원 CAD 모델링 및 기구, 동역학 해석을 수행하여, 설계의 타당성을 1차적으로 검증 ADAMS & MATLAB/Simulink co-simulation 기술을 통해 실선 6자유도 모션에 대한 위성 안테나 3축 제어 시뮬레이션을 수행 위성 안테나 3축 제어 시뮬레이션에 적용한 PIDA 제어기의 우수성을 확인하여 실제 안테나 시스템에 적용이 가능한 기반 확립 실제 실험과 시뮬레이션의 비교 검증