(Numerical Analysis of Nonlinear Equation) 2. 비선형 방정식 해법 (Numerical Analysis of Nonlinear Equation) Korea University of Technology and Education School of Mechatronics
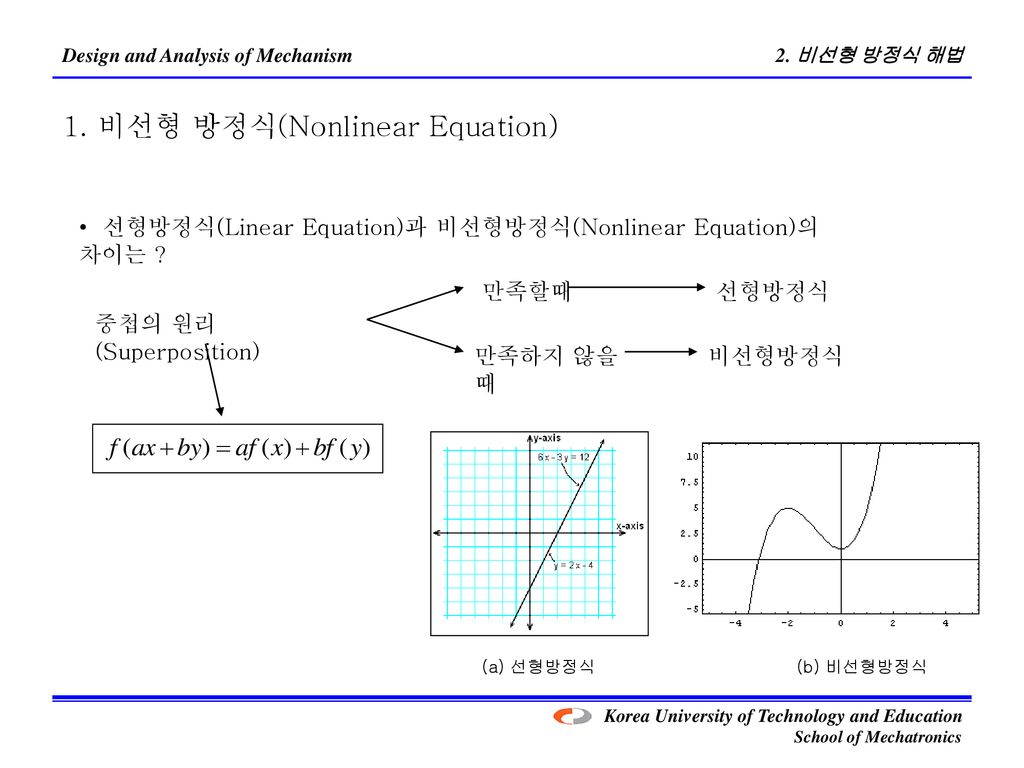
1. 비선형 방정식(Nonlinear Equation) 선형방정식(Linear Equation)과 비선형방정식(Nonlinear Equation)의 차이는 ? 만족할때 선형방정식 중첩의 원리(Superposition) 만족하지 않을때 비선형방정식 (a) 선형방정식 (b) 비선형방정식 Korea University of Technology and Education School of Mechatronics
2. Newton Rapshon Method closed form 형태로 방정식을 구할 수 없을 때 수치해석적 방법을 이용하게 되며 Newton Raphson방법은 잘 알려진 비선형 방정식을 풀 수 있는 기법이다. Problem statement : Find the root of a function (Find the value such that ) Korea University of Technology and Education School of Mechatronics
Newton-Raphson procedure ① 근의 초기치를 가정한다 ( ) ② 초기치에 대하여 함수에 대한 접선을 그리고 접선의 연장선과 x 축이 만나는 점 ( ) 을 구한다. ③ 위의 방법을 방정식이 만족할 때 까지 반복한다. 반복식은 다음과 같다. Korea University of Technology and Education School of Mechatronics
(예제 1) 다음 비선형 방정식의 해를 구하시오. (예제 2) 다음 비선형 방정식의 해를 구하시오. Korea University of Technology and Education School of Mechatronics
비선형 연립방정식의 근 찾기 위의 식을 Taylor series와 편비분을 이용하여 확장하면 윗 식은 선형 연립방정식이므로 를 구할 수 있다. 따라서 Korea University of Technology and Education School of Mechatronics
(예제 3) 다음 비선형 연립방정식의 해를 구하시오. (풀이) 초기치 : Korea University of Technology and Education School of Mechatronics
3. MATLAB을 이용한 비선형 방정식 해 구하기 fzero : 1 변수 비선형 방정식의 해 fsolve : 최소자승법에 의한 비선형 연립방정식의 해 fsolve : Solve a system of nonlinear equations Syntax x=fsolve(‘함수식 또는 함수명’,초기치) fzero : Zero of a continuous function of one variable Syntax x=fzero(‘함수식 또는 함수명’,초기치) Korea University of Technology and Education School of Mechatronics
(예제 4) 다음 비선형 방정식의 해를 MATLAB을 이용하여 구하시오. Korea University of Technology and Education School of Mechatronics
(예제 5) 다음 비선형 방정식의 해를 MATLAB을 이용하여 구하시오. 해(초기치=2)인 경우 (m-file 을 이용하는 방법) m-file 해(초기치=4)인 경우 Korea University of Technology and Education School of Mechatronics
(예제 6) 다음 기구에서 P=50 lb 의 하중이 가해질 때 평형상태에서 바OA의 기울기를 구하시오. 단, 스프링은 바OA가 x축과 일치할 때 자유길이이다. Korea University of Technology and Education School of Mechatronics
정적 평형상태에서 스프링의 양 끝점(B,C)의 좌표값은 다음과 같다. (풀이) 정적 평형상태에서 스프링의 양 끝점(B,C)의 좌표값은 다음과 같다. 평형상태에 도달했을 때 스프링의 최종길이(FL)는 다음과 같다. 삼각형 BCD로 부터다음과 같은 관계식을 얻을 수 있다. 평형상태에 도달했을 때 스프링의 늘어난 길이는 다음과 같다. OL : 스프링의 자유길이 평형상태에 도달했을 때 스프링에 미치는 힘은 다음과 같다. Korea University of Technology and Education School of Mechatronics
스프링힘의 x축과 y축에 대한 분력을 구하면 다음과 같다 평형 상태에서 원점(O)에 대한 평형 방정식을 다음식과 같이 얻을 수 있다. 결과 : Korea University of Technology and Education School of Mechatronics
(예제 7) 다음 기구에서 하중(W)이 가해질 때 평형상태에서 바의 기울기를 구하시오. 단, 스프링은 바가 y축과 일치할 때 자유길이이다. 단, W=400 lb, L=8 inches, R=3 inches, K=250 lb/in 이다 원점에 대한 모멘트 평형방정식을 세우면 다음과 같다 결과 : Korea University of Technology and Education School of Mechatronics
(예제 8) 다음 비선형 방정식의 해를 MATLAB을 이용하여 구하시오. Korea University of Technology and Education School of Mechatronics
(풀이) MATLAB File 초기치 (m-file 을 이용하는 방법) m-file 해(근) Korea University of Technology and Education School of Mechatronics
(예제 9) 다음 그림은 스프링에 의한 정적 평형상태에 도달한 모양을 나타낸다. 그림에서 그리고 를 구하라. 단, 그림에서 그리고 를 구하라. 단, 결과 : Korea University of Technology and Education School of Mechatronics